有機ハロゲンモニター
ごみの燃焼は、たき火や山火事とは異なり、金属と塩類が共存する燃焼系であり、人類が初めて地球上にもたらしたものです。ハロゲンが金属を活性化し、新たな有機ハロゲンを生じます。これを最小化しなければなりません。塩ビなどの人工有機ハロゲンも、燃焼によって無機化・安定化されます。その監視・制御のために、気相の有機ハロゲンを迅速にオンラインモニタリングするものです。
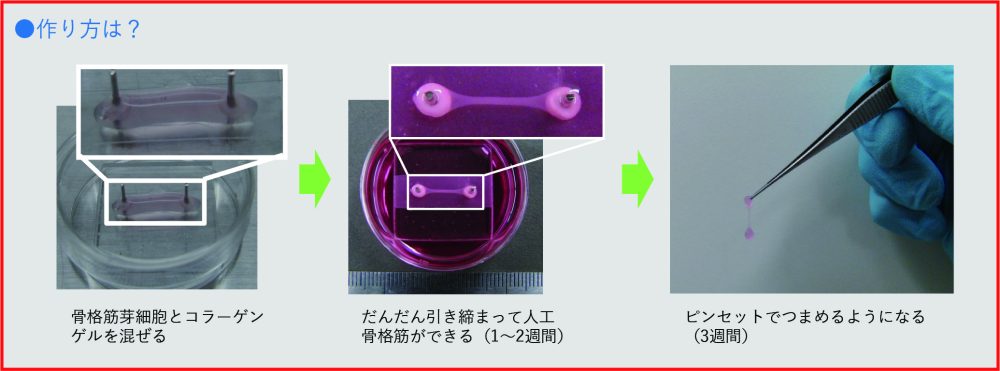
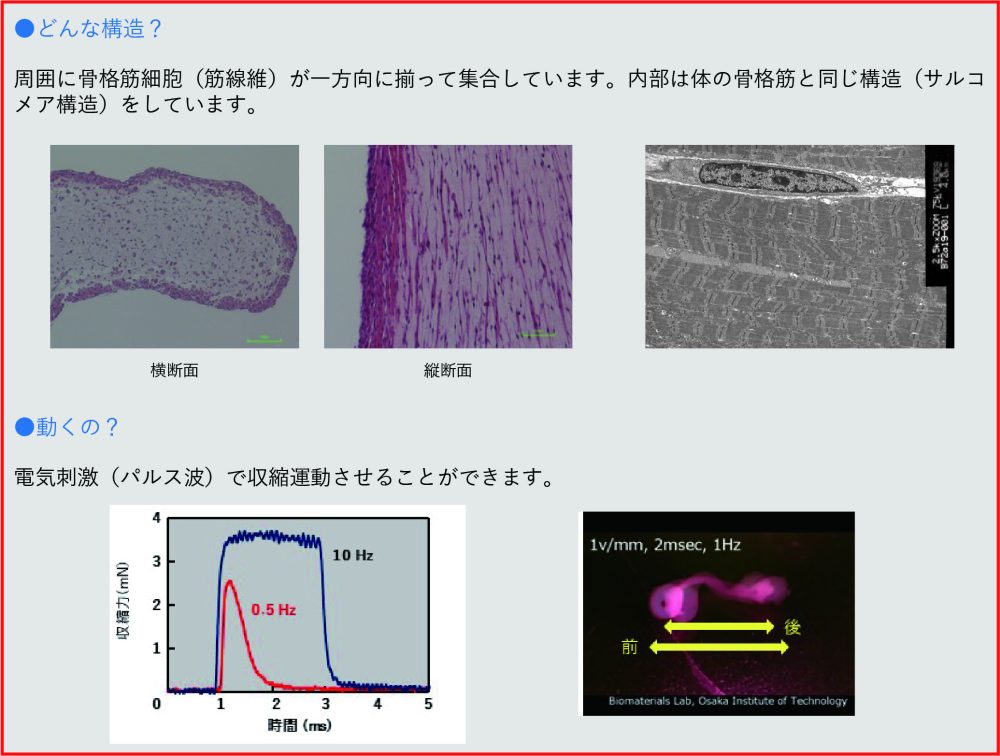
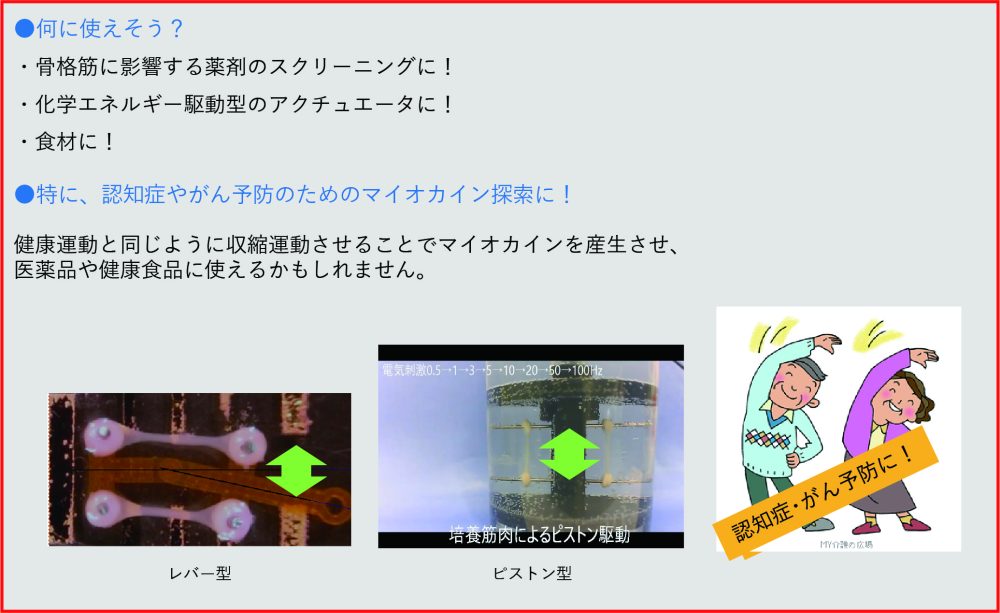
組織工学・再生医療技術を用いて、体の外で骨格筋を作製することに成功しました。 この人工骨格筋は、長さ約15mm、直径約0.5mmと小さなサイズですが、電気刺激によって、人間の筋肉と同様の収縮運動させることができます。 最近、運動が健康に良いのは、骨格筋が作るマイオカインと呼ばれる物質によることが分かってきました。マイオカインは認知症の予防やがん予防にも効果があるとされています。 この人工骨格筋を運動させることでマイオカインをたくさん作らせることが可能だと考えています。
論文
「Control of myotube contraction using electrical pulse stimulation for bio-actuator」(2009)『J Artif Organs』12 (2)p.131-137.
「Development and evaluation of a removable tissue-engineered muscle with artificial tendons」(2017)『J Biosci Bioeng』123 (2)p.265-271.
「Tissue-Engineering Approach to Making Soft Actuators」(2019)『Soft Actuators』p.679-690.
特許
特許第4092397号
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム