フェノールポリマーの合成とその機能性評価
近年,酵素触媒をプラスチックなどのポリマー合成に利用する方法が注目されている.これは酵素触媒の有する次のような特徴を活用しよ うというものである.1,高い触媒活性 2,基質特異性 3,生分解性 4,穏和な条件下で機能.本研究では,このような酵素触媒の特徴を活かし,主として西洋ワサビ由来のペルオキシダーゼ(HRP)を触媒としてフェノール類を重合させる.生成するフェノールポリマーについて,抗酸化性などの機能性評価を行う.

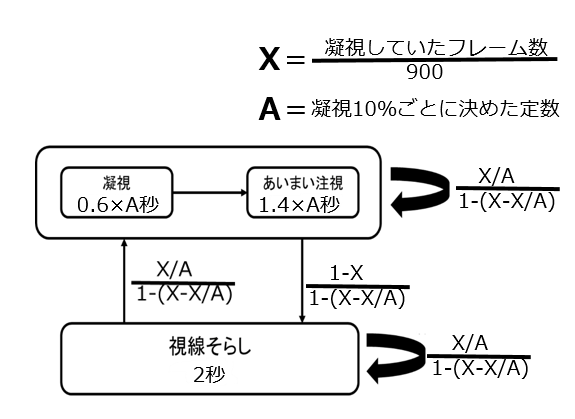
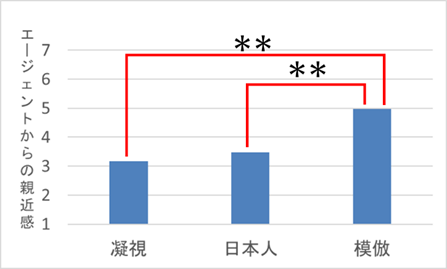
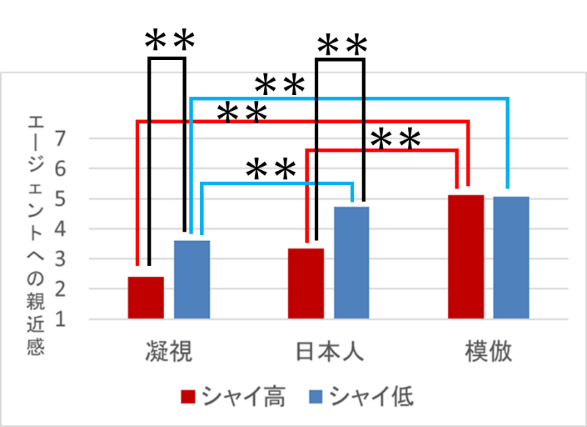
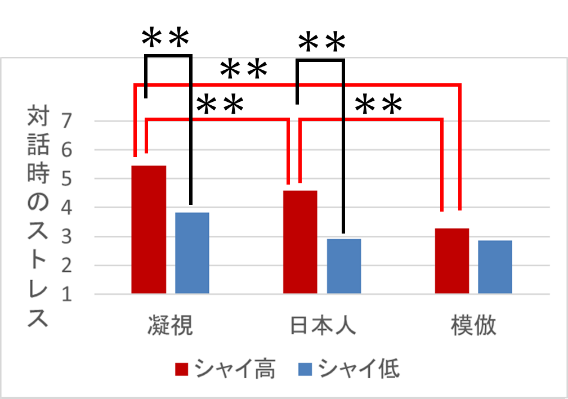
シャイな人間は対話相手の視線に敏感であり,注視されることを嫌うということが示されている.本研究は実験参加者の視線行動に適応するエージェントの視線行動の開発と評価を目的とする.具体的には,対話中のユーザの視線行動をアイトラッカーで取得し,過去15秒間にユーザがエージェントの目を注視していた割合を基に対話エージェントがユーザの目を注視する割合を適応させ,ユーザと類似した凝視量を保ちながら視線行動をとる対話エージェントを開発した.評価実験では,シャイなユーザグループに対話のストレスの軽減効果および対話エージェントへの親近感の向上効果が見られた.


論文
「Development and Evaluation of Agent's Adaptive Gaze Behaviors」(2020)『Proceedings of Human-agent Interaction 2020 (HAI'20)』
「ユーザの視線行動に適応したエージェントの視線行動の開発と評価」(2020)『信学技報HCS2020-23』120(136)p.11-16.
「ユーザの視線行動に適応したエージェントの視線行動の開発と評価」(2020)『HAIシンポジウム2020』
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム