
金属コロイド粒子の作製と応用
金や銀等の貴金属は、その輝きから人々を魅了し、装飾品や硬貨として用いられてきました。金は、コロイド粒子になると赤紫色に、銀は黄色に発色します。このような金属コロイド粒子は、古くからステンドグラス等に使用されてきた色材以外に、バイオセンサ、3次非線形光学材料あるいは触媒材料としての応用が進められています。ここでは、銀コロイド粒子の作製方法とSERS(表面増強ラマン散乱)センサとしての特性について紹介します。
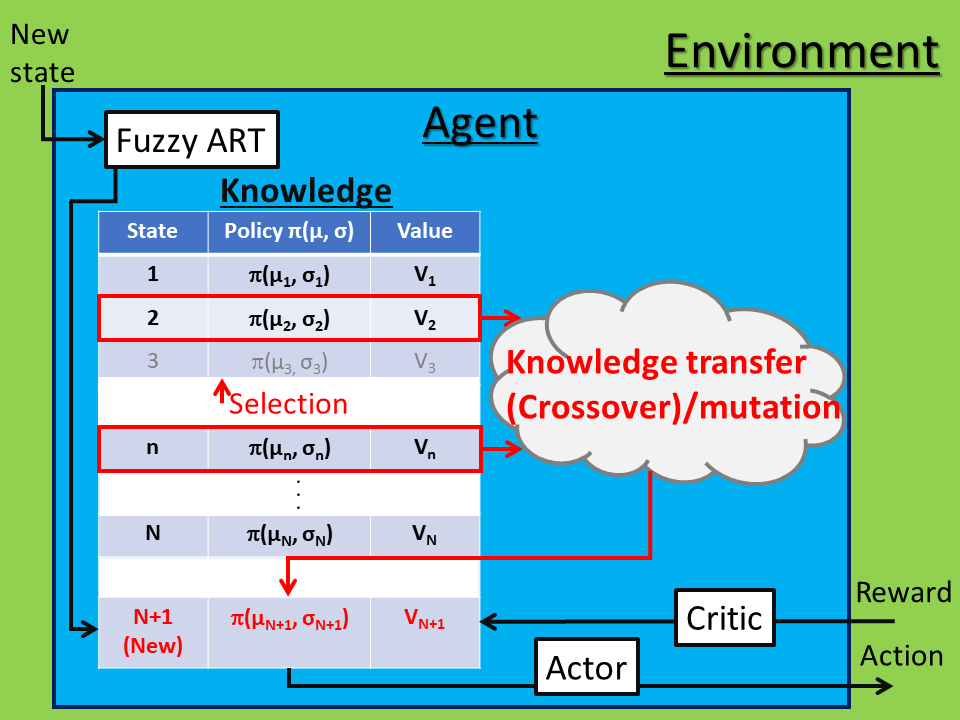
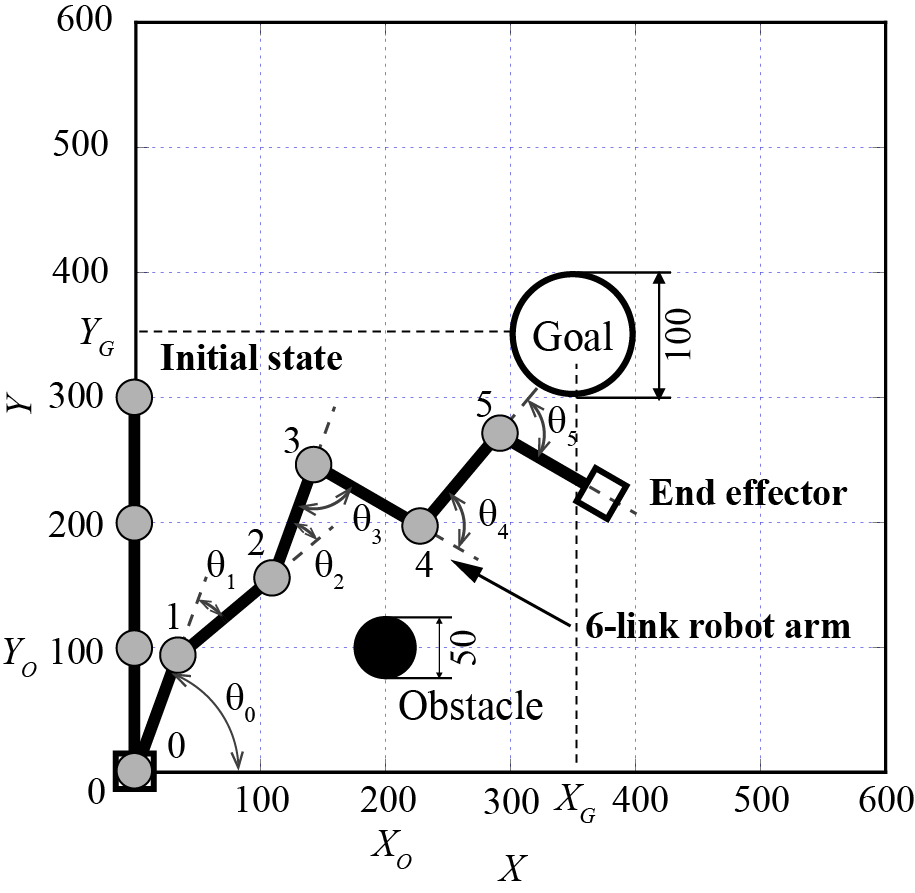
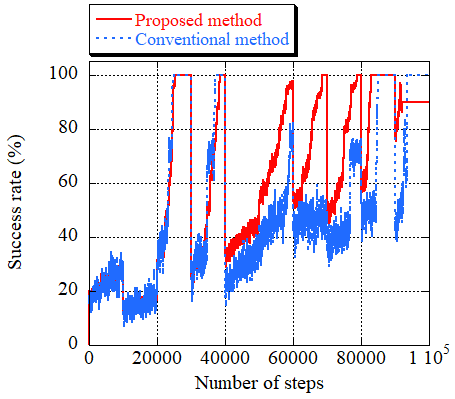
近年,人工知能・機械学習技術の発展もあり,これらの知能化技術をロボットの環境適応能力や自律性の付与の手段として用いることが期待されています.しかし,強化学習を含む機械学習は,一般的に多くの学習時間を必要とする根本的な問題を抱えています.従って,学習時間を短縮することが,実時間で学習する実ロボットにとって,特に解決すべき重要な課題です.私達は,遺伝的アルゴリズムの概念で説明した学習高速化手法を開発し,より高度なロボットの知能化の実現を目指しています.



論文
「学習時間の短縮に向けた状態価値を用いた知識転移手法」(2017)『電気学会論文誌C』137(9)p.1171-1176.
「知識の転移と選別機能を備えた強化学習手法の複数タスク下における性能検証」(2016)『システム制御情報学会論文誌』p.152-154.
「転移学習における価値に基づく知識の選別」(2015)『システム制御情報学会論文誌』28(6)p.275-283 .
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム