オクシモロンの謎―意味の矛盾と伝達効果
オクシモロンとは「小さな巨人」のように反対の意味が同じ対象に適用されるレトリックである.「小さくて大きいものは何だ?」とすれば「なぞなぞ」にもなり得るが,字義通りに考えれば反対語が共起しているのだから矛盾することになる.しかし,実際には意味解釈に支障は来さない.それどころかこのレトリックならではの伝達効果がある.オクシモロンの構造,伝達効果は私の研究テーマの一つである.
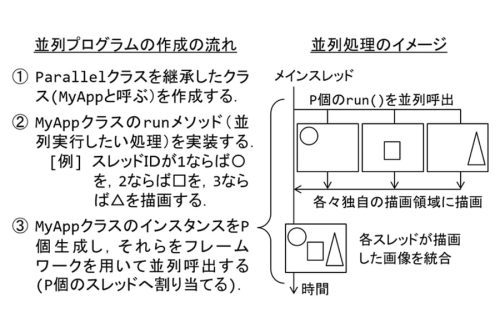
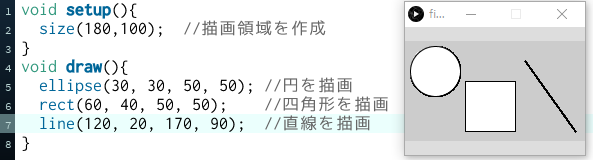
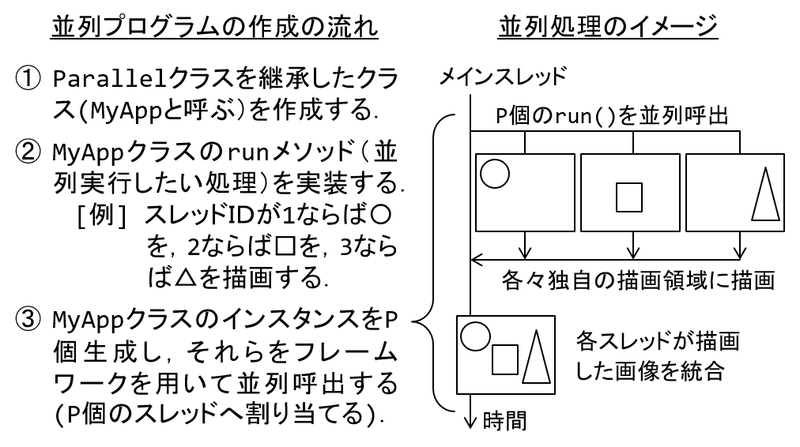
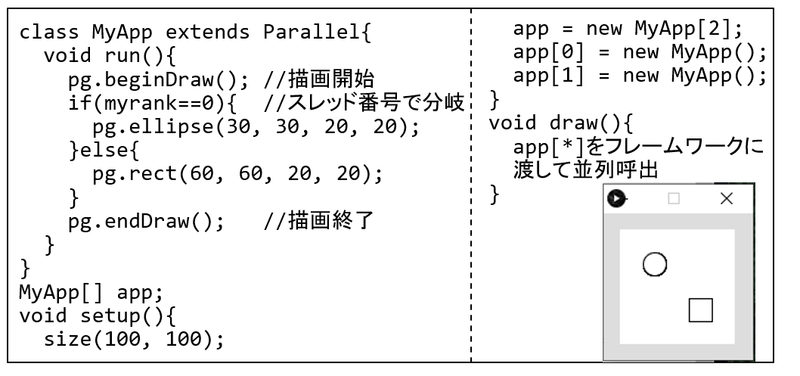
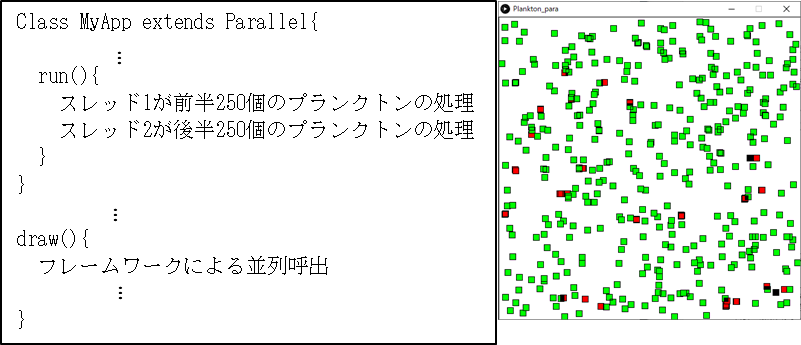
マルチコアCPUを用いてプログラムの実行性能を上げるためには並列プログラムを作成する必要がある。一般に、並列プログラミングの学習は初学者にとっては容易ではない。その理由として、数値計算問題を題材とすること、および大規模な計算でない限り並列化の効果を実感できないことから、初学者の興味を維持しにくいことが考えらえる。本研究では、並列化の効果を体感しやすく、かつ、平易な教材を扱える並列プログラミングの学習環境として、Processing言語を用いた図形アニメーションプログラムのための並列化フレームワークを提案する。
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム