リース機器の循環型物流における需要予測と在庫最適化
出荷と撤去・回収の存在する循環型物流において,最適化技術を利用して需要の期待値を予測するとともに,突発需要等の変動を確率分布を用いて予測した.これにより倉庫や販売店など,全国に点在する数十拠点を対象に在庫最適化を行った.実際の物流システムにも採用され,実務担当者による運用からさらにコストを低減することが可能となった.
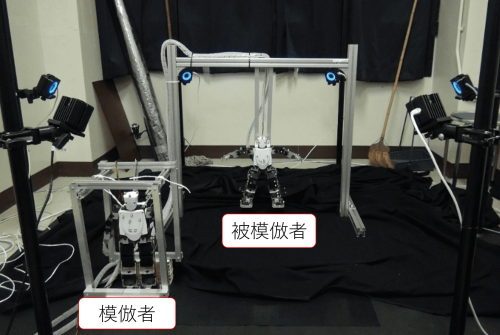
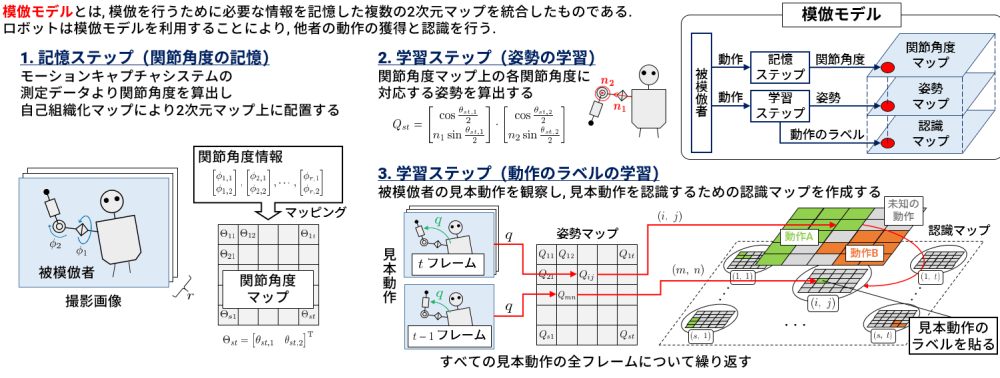
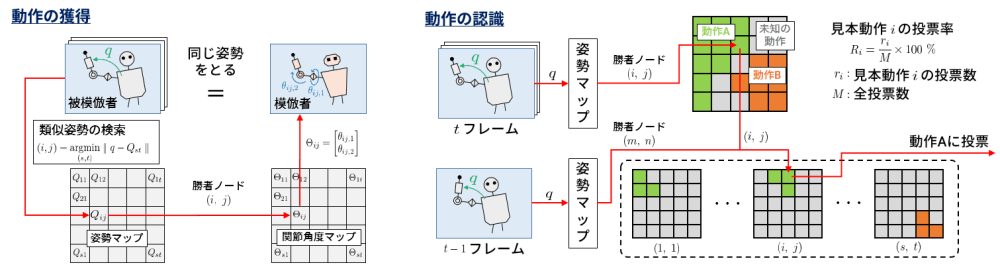
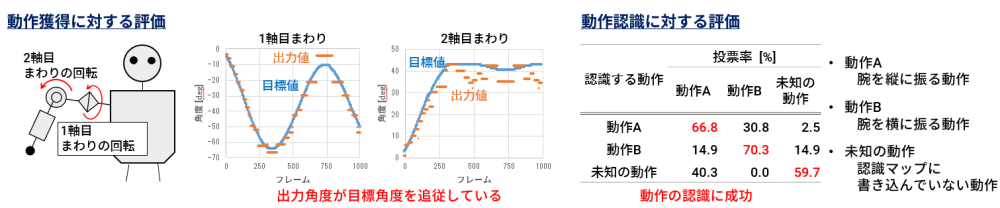
日常生活の中で活躍するロボットには, 周囲の環境に合わせ臨機応変に動作することが求められる. ロボットに臨機応変な動作をさせるには, ロボットに他者の動作を模倣をさせることが有効である. ロボットは模倣により, 事前にプログラミングされていない新たな動作を獲得する. 本研究では, ロボットが人間のように新たな動作を獲得するシステムを構築することを目的とし, 自己組織化マップ (SOM: Self-Organizing Map) とモーションキャプチャシステムを用いて, 他者の動作を模倣させることにより, ヒューマノイドロボットの高度な動作制御の実現を目指す.
論文
「自己組織化マップを用いた摸倣による小型ヒューマノイドロボットの動作制御」(2020)『2019年度計測自動制御学会関西支部・システム制御情報学会シンポジウム予稿集』
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム