快適な場所が散りばめられた会館建築の設計
宗教施設の会館建築において、来館した信者が思い思いの場所で時間を過ごすことができる「居場所」となる建築とすることが求められた。敷地は都心部の狭小なものであったため、諸室を立体的に配置して、天空から差し込む光を中心とした共用空間を構築した。
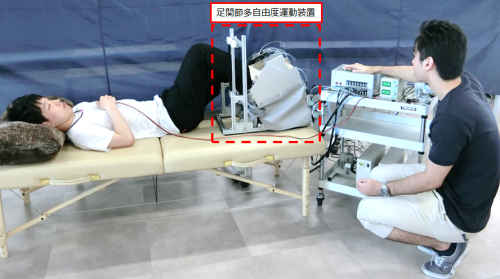
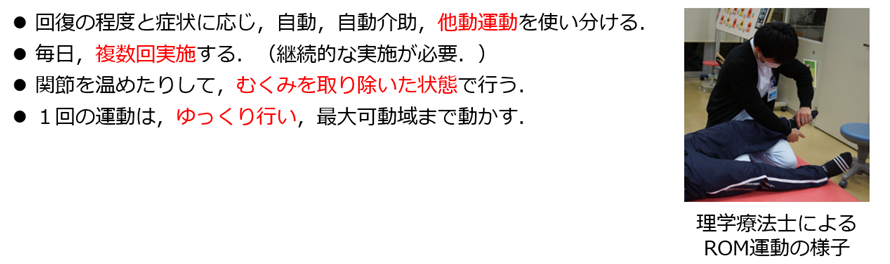
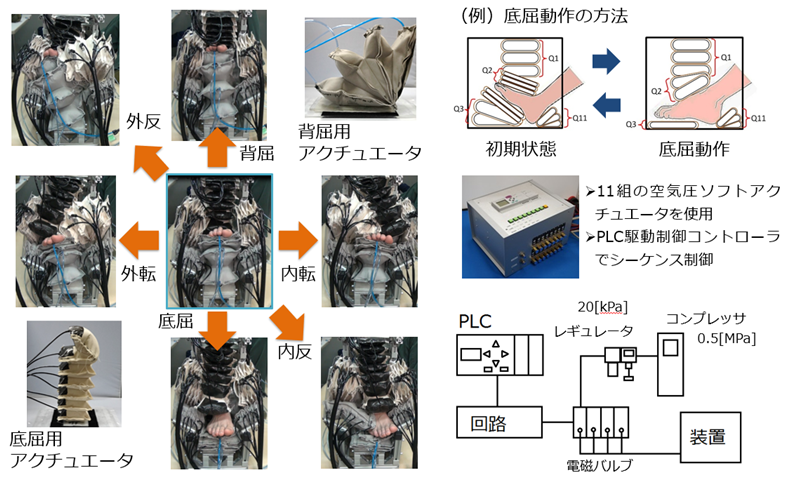
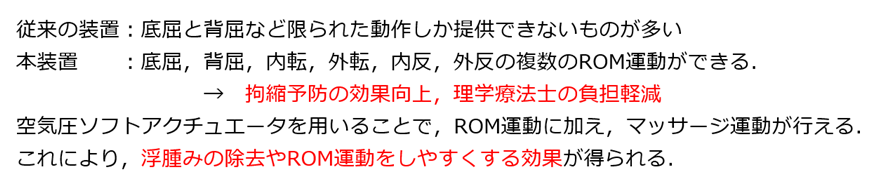
筋萎縮と関節拘縮の予防には,関節可動域(ROM)訓練や筋肉や腱のストレッチなどによって,対象の部位を動かすことが重要である.このような運動は,理学療法士などの介助者によって実施され,患者に合わせて複数の動作を実施する.本研究は,独自に開発した空気圧ソフトアクチュエータを用いることで,足関節のROM訓練やストレッチ運動など多様な動作を実現できるリハビリテーションシステムの開発である.本アクチュエータの柔軟性を利用することで,患者に対して安全で予防に必要な多様な動作を提供できる点が特長である.
論文
「Development of ROM Device for Ankle Joints using Pneumatic Soft Actuators」(2018)『Proceedings of International Conference and Exhibition on New Actuators and Drive Systems (ACTUATOR18)』
「ソフトアクチュエータを用いた足関節の多自由度他動運動装置の開発」(2018)『日本機械学会2018年度年次大会講演論文集』S1110401
「Feasibility Test of Range of Motion Exercises for Ankle Joints Rehabilitation Using Pneumatic Soft Actuators」(2016)『Lecture Notes in Electrical Engineering』345
特許
特願2018-069019 「足関節・足部の運動支援装置」
特願2020-017922 「足関節の運動装置」
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム