既設照明によるかんたん屋内定位技術 CEPHEID(セファイド)
屋内に設置されている照明光は、多くの場合個体差があります。「部屋A」と「部屋B」の照明機器はたとえ同一モデルであっても微妙な個体差があるのです!もちろん人間が目で見てわかる違いではありません。本技術はそれをAIで識別し、屋内の位置推定に用います。
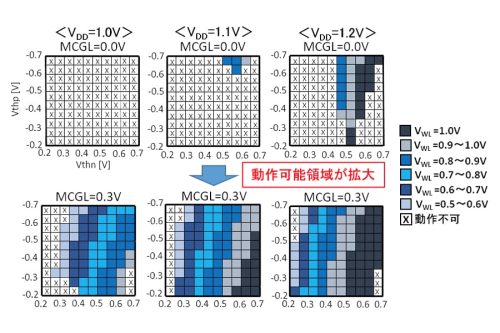
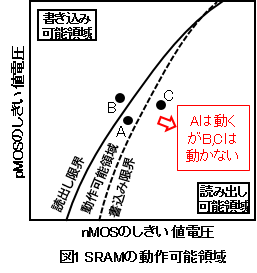
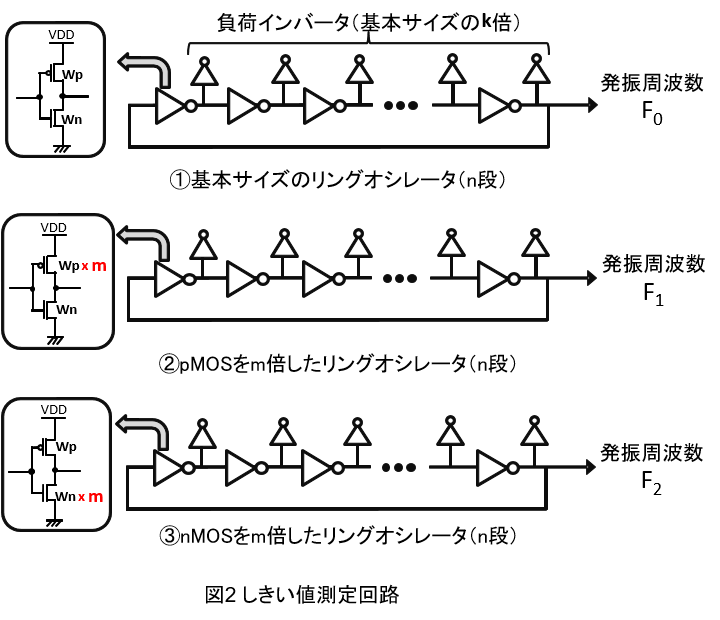
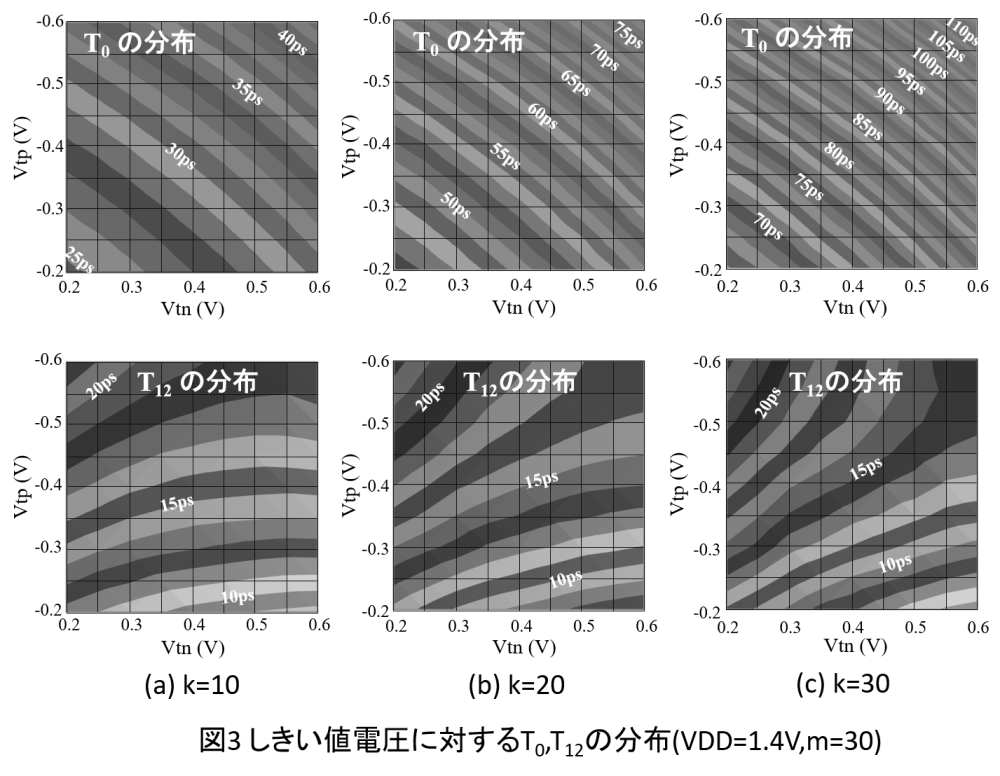
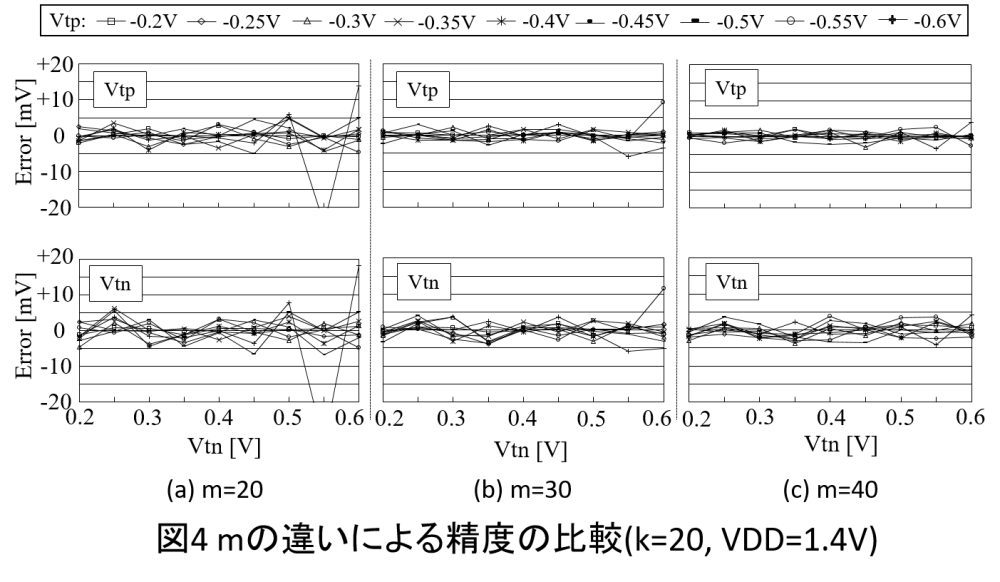
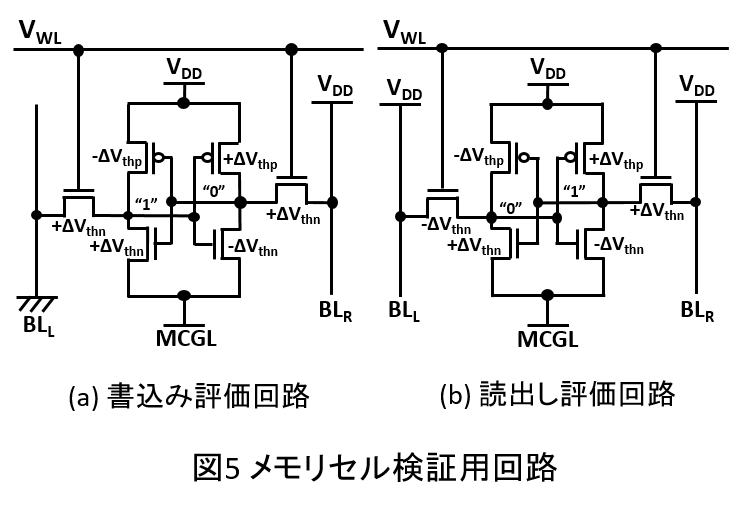
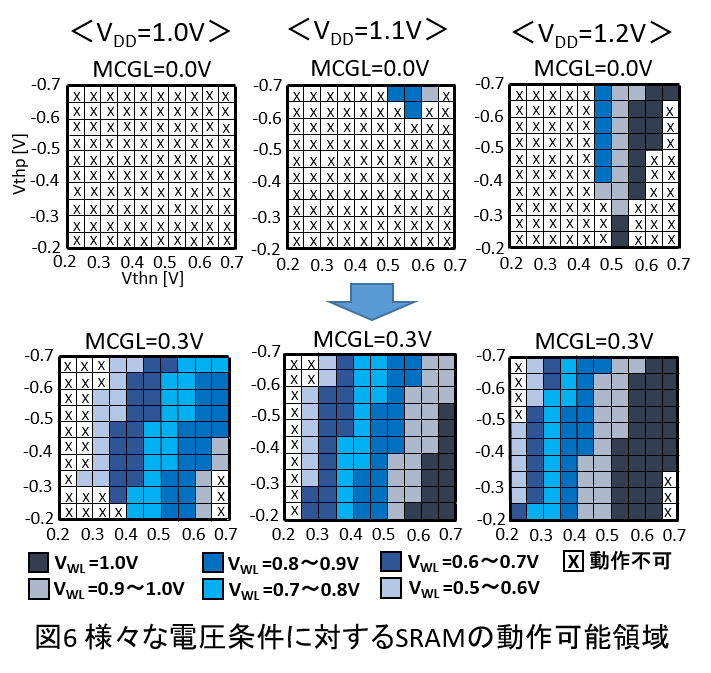
トランジスタのしきい値電圧のばらつきによってSRAMが動作不良となる問題に対して、これを救済し歩留まりを向上させる手法を開発しました。まず、オンチップでしきい値電圧を測定する方法を提案し、5mVの精度で検知可能であることを確認しました。さらに、様々なしきい値電圧において、メモリセル(記憶回路の最小単位)に与える電圧を変化させて動作可否を調べることにより、SRAMに与える最適電圧を明らかにしました。なお、本研究はJSPS科研費 (JP23560423)の助成を受けたものです。
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム