「小さなまち」の維持・管理・運営と地域住文化の継承
本研究では、従来の建築計画・建築設計・環境デザインでは見過ごされがちであった地方の「小さなまち」の維持・管理・運営のモデルを構築し、空き家対策としてのリノベーション提案を行い、「まちの居場所」を創出する。また、「小さなまち」の地域固有性を発掘・発信するとともに、地域住文化を継承するためのビジョンを提案する。さらに、本研究で得られた成果は「小さなまち」のまちづくりに還元し、コミュニティデザインの場を創出する。
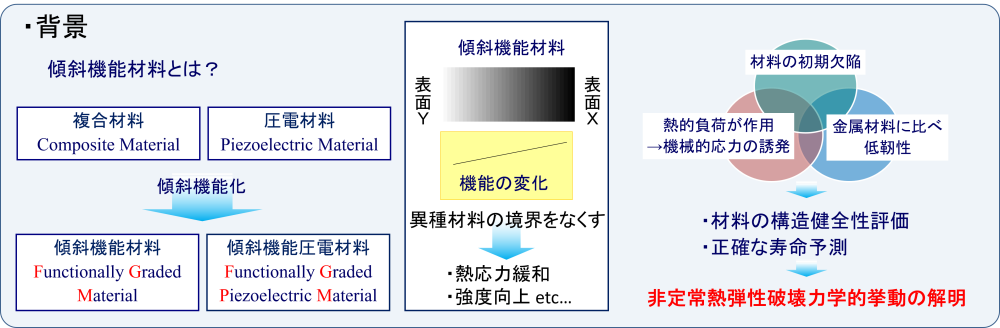
数理固体力学は材料・機械・建築・土木工学に限らず、広い応用分野の様々な現象に対応しているが、その応用の根幹となるのは「線形弾性力学」である。この弾性力学は応用の目的や現象に合わせて基礎微分方程式を解くことに帰着される。 本研究室では、苛酷な使用条件下にある機械・構造物の材料設計および安全性・信頼性評価を目的として、材料の電気・熱・力学的挙動を解明している。恩師から頂いた言葉「弾性体の平衡の問題においては、非常に一般的な大定理を打ち立てるよりは、種々の特解を求めて集積することで知識はもたらされる」を胸に、以下に示すような破壊力学解析を実施し、弾性数理解析の学問分野の確立を目指している。

論文
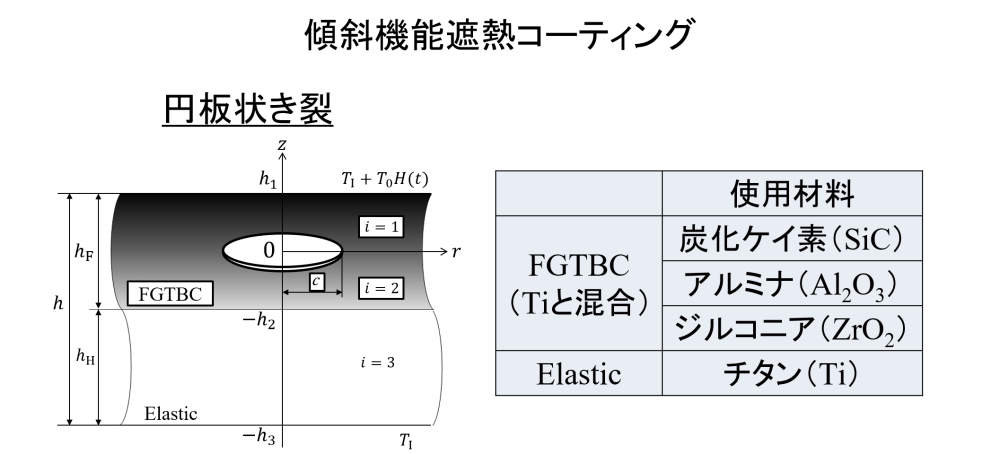
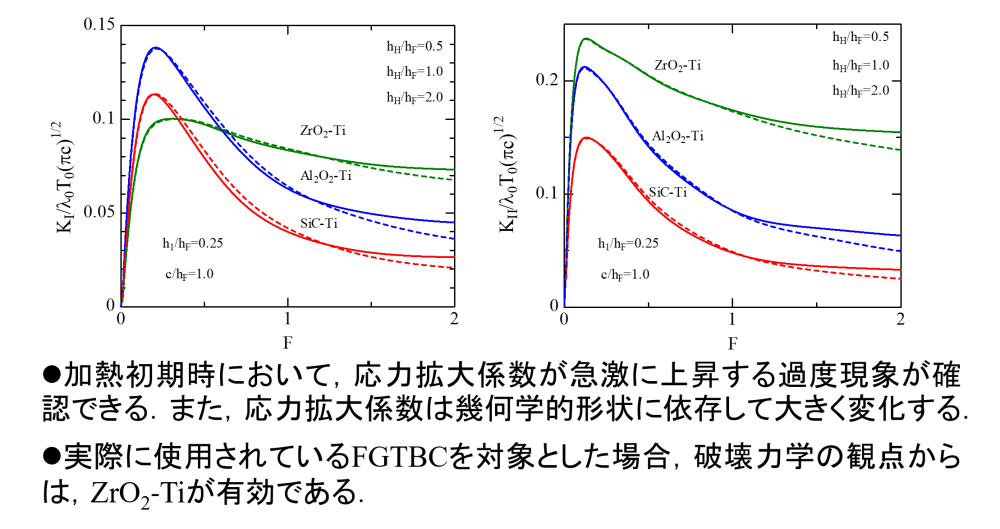
「円板状き裂を有する傾斜機能遮熱コーティング積層板の非定常熱弾性応答」(2019)『Journal of Functionally Graded Materials』33p.58-68.
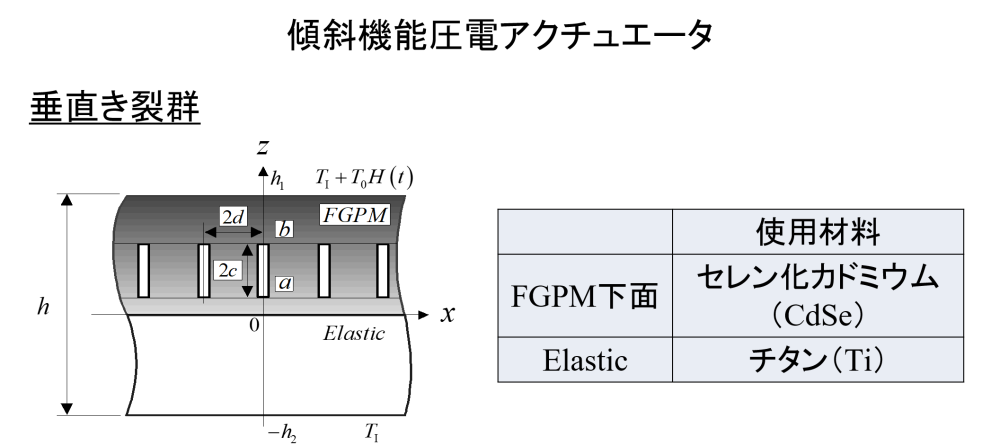
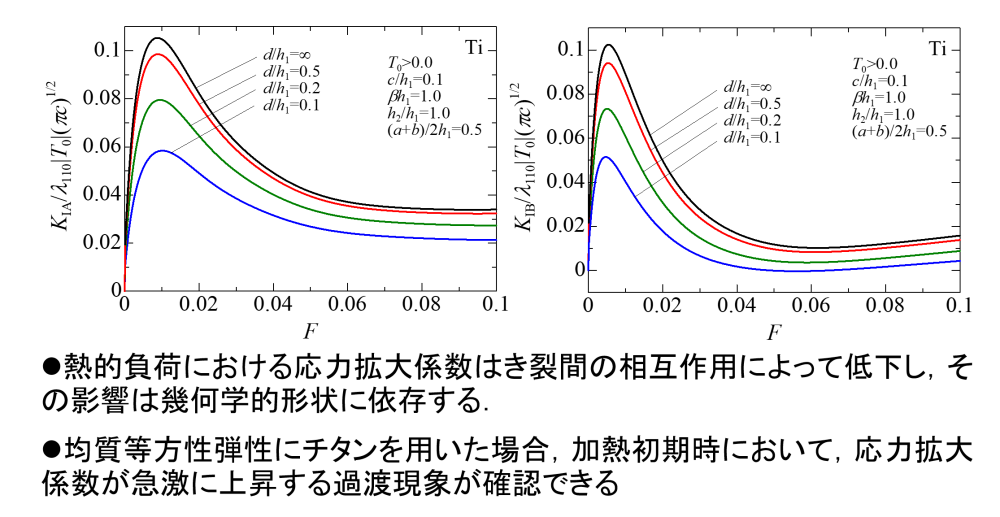
「界面に垂直な平行き裂群を有する傾斜機能圧電積層厚板の非定常電気熱弾性応答」(2019)『Journal of Functionally Graded Materials』34p.1-9.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム