
映画・洋楽の英語教育への活用
英語の運用能力向上には、英語に接する時間の増加が必須である。たしかに、学習時間の増加がそのまま英語運用能力の向上につながるとも限らない。しかし,学習量を増やすことは不可欠である。これには、苦にせず接することができる素材が必要となる。元来、娯楽用に制作された映画や洋楽は、楽しみながら本物の英語に接することができるという点で優れている。ただ、本物であるからこそ、学校の英語との橋渡しの工夫が必要となってくる。
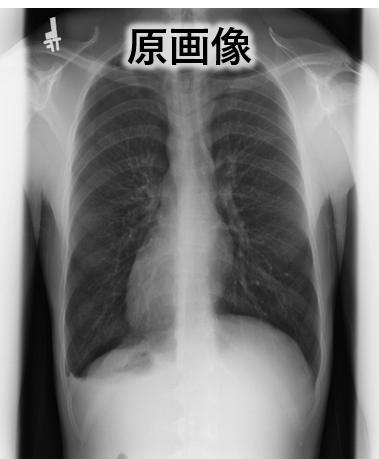
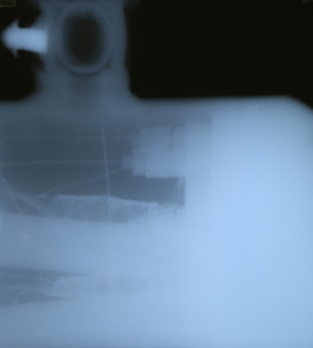
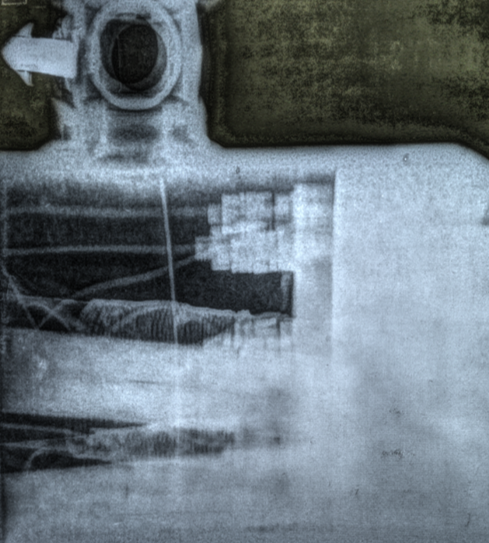
社会インフラを支える工業製品など,簡単に停止して点検できないものは多く,それらは非破壊検査によって点検される.非破壊検査の一つとして,X線画像を用いた検査が挙げられる.X線は物体の透過率の違いにより内部構造を写し出せるが,X線が透過し難い金属などで覆われている場合,映し出せる内部構造の像は薄くはっきりとしないものとなる.これまで個別の工業製品に対するX線画像検査は熟練工の目視技術によって成り立っていたが,本技術は熟練工が確認する特徴を可視化して誰もが頑健に検査できるようにする.


論文
「“Visualization based on HDR Image Processing for X-ray Inspection of Power Transmission Cable Joints」(2019)『Jicable'19』
「Tone-mapping for an HDR surveillance system using SIFT features」(2013)『EUSIPCO 2013』
「High Contrast Tone-mapping and its Application for Two-layer High Dynamic Range Coding」(2012)『APSIPA ASC 2012』
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム