図面分析による建築設計プロセスの解明
人々の生活や活動の場である建築空間は、個人にとっても社会のとってもたいへん重要な活動の舞台である。優れた建築空間の構築は建築家や設計者の個人の力量によるものが多いが、多くの関係者や施工者との協働も重要なファクターとなっている。また優れた設計には優れたプロセスが存在する。設計プロセスを建築設計図面を手掛かりに解析し、時系列に沿った検討過程を明らかにすることで今後の設計に資する知見を構築する。
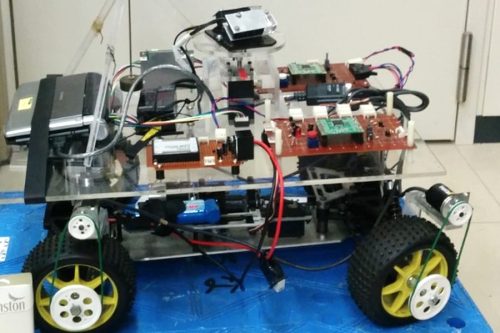
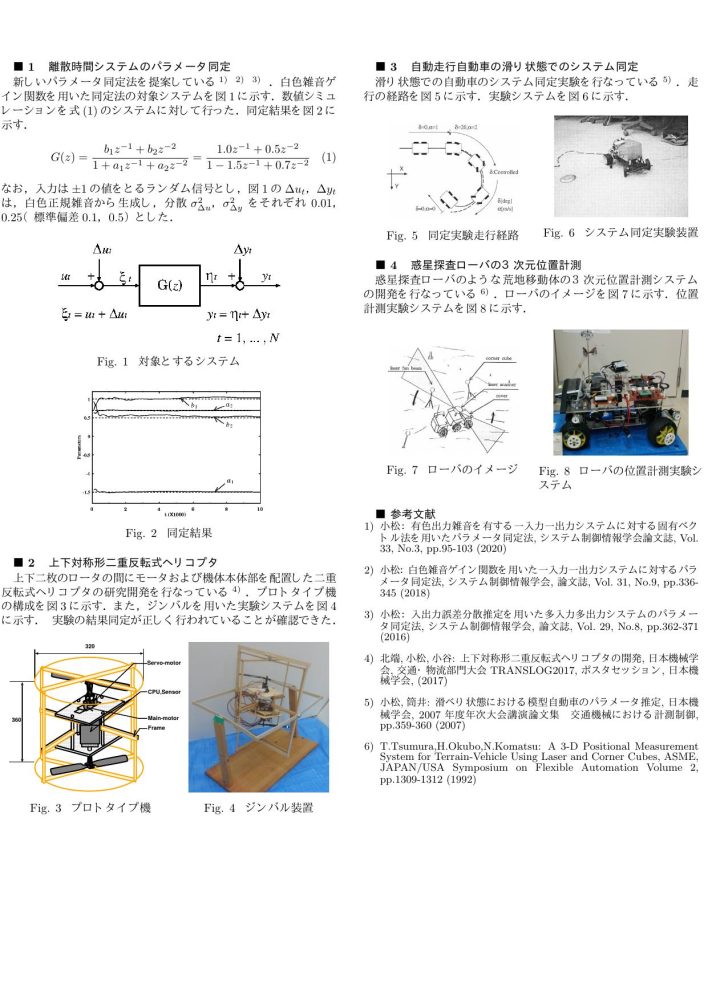
自動車や飛行機などの移動体の制御に関する位置計測システム,誘導制御システムの構築を目指して研究を行っている.位置計測システムについては,加速度計,ジャイロ,画像処理を用いた計測を融合し,移動体の位置を瞬時に計測することを目標にしている.誘導制御については,移動体の3次元的位置姿勢を制御するため,制御システムの動的特性を推定する同定を行ない,安定化制御を実現することを目標にしている.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム