発熱の分子・細胞メカニズムと薬物評価
炎症、感染、脳出血にはしばしば発熱や痛覚過敏がともなう。これらの病態は生体防御としての側面と、増悪因子としての側面があり、適切な制御が望まれる。そのためには、これらの病態の分子・細胞メカニズムを解明することが必要である。本研究室では様々なマウスの発熱モデルを用いて、その分子・細胞メカニズムを研究している。この実験系を用いて、発熱時の病態に対する薬物の効果を評価することもできる。
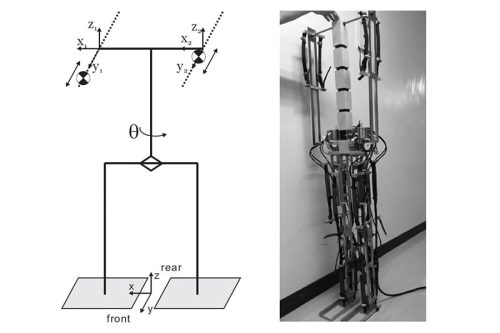
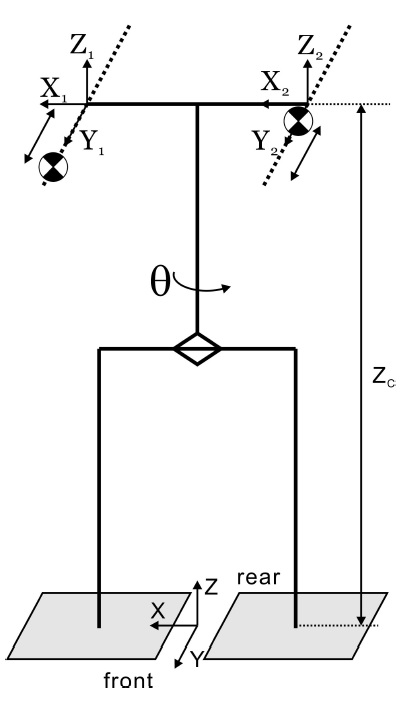
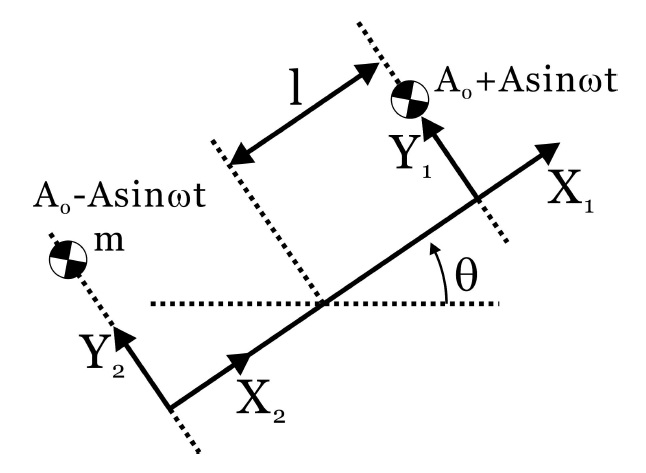
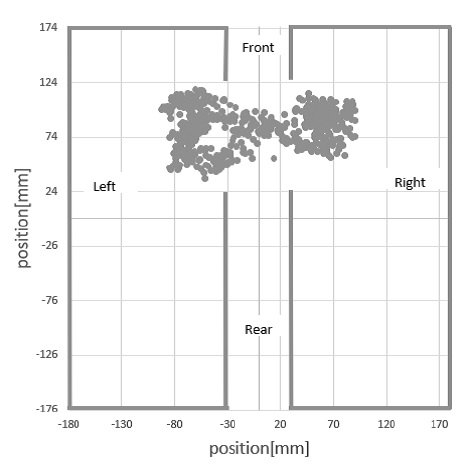
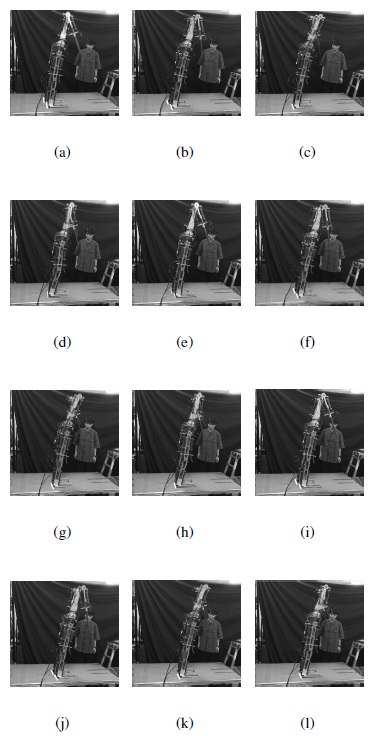
動物の四脚歩行と異なり,ヒトの二脚歩行は力学的に不安定なものです.体幹や腕部といった質量の大きな部位が脚の上にあり,これを転倒せずに片足で支える制御は大変難しいです.本研究ではこれら上半身を制御の安定性を阻害する要素と考えるのではなく,「うまく上半身を動かすことで歩行を促進できないか?」と考え,そのメカニズムの解明と検証を行います.検証では上半身をバネ要素を持つ柔軟体幹と前後に質点を移動させる腕パーツに近似し,歩行の安定指標である床反力中心が腕振り運動を調整することで操作可能であることを数理的に示しました.またこのことを検証するために実機を試作し,腕振り運動により床反力中心が歩行をしやすいように移動していること,それにより歩行が可能であることを確認しました.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム