高速A/D変換器の非線形性を改善するデジタル補正技術
工学部
電気電子システム工学科
集積回路工学研究室
木原崇雄
准教授
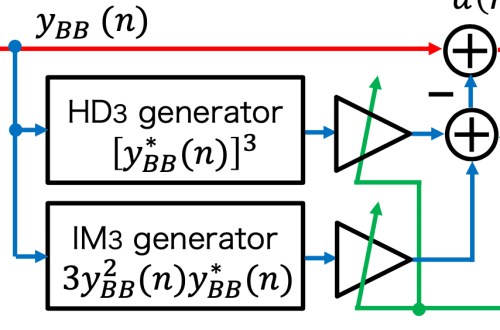
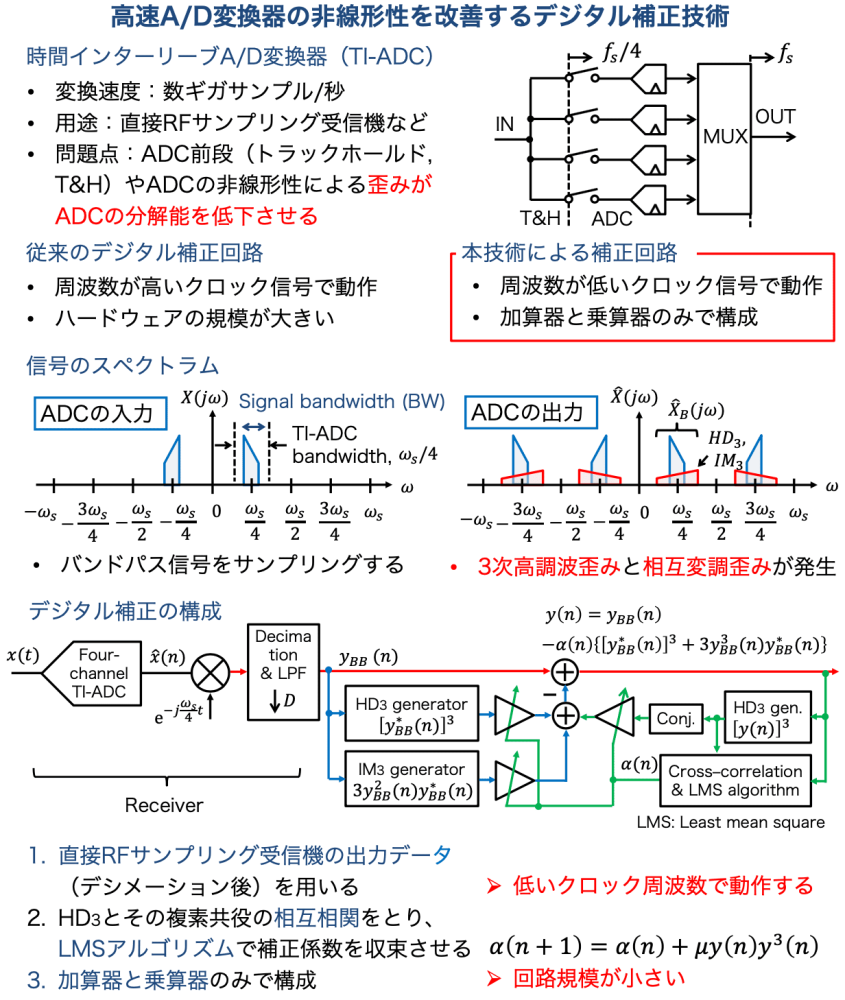
直接RFサンプリング受信機はA/D変換器(ADC)で数GHzのRF信号を低速のデジタルデータに変換している。この受信機の消費電力を十mW程度に減らせれば、無線端末用集積回路に応用可能となり、その開発コストと市場投入までの期間を軽減・短縮できる。電圧制御発振器(VCO)を用いたADCは高速変換と低消費電力動作を両立できるが、VCOの非線形性により発生する不要波が分解能を低下させる。本展示では、デジタル回路で不要波を低減させることでADCの高速変換・低消費電力動作を実現する技術を紹介する。
論文
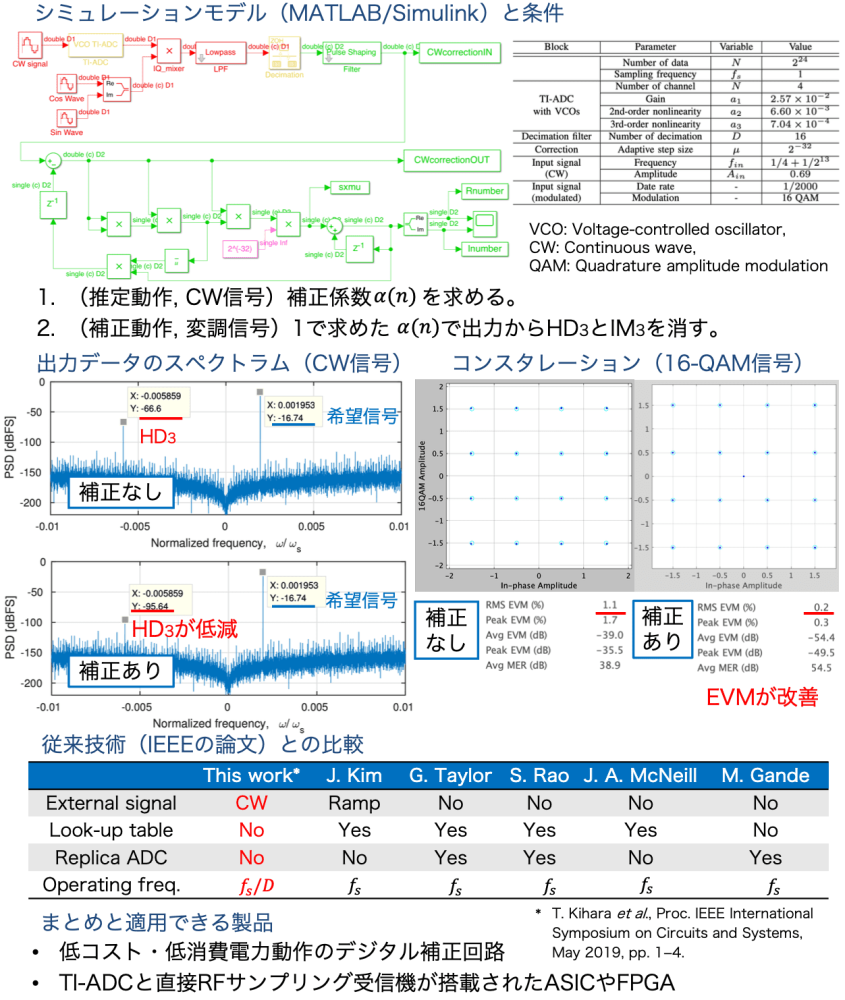
「Digital Third-Order Nonlinearity Correction for Time-Interleaved A/D Converters with VCOs」(2019)KiharaTakao『Proc. IEEE International Symposium on Circuits and Systems (ISCAS)』p.1-4.
「Digital Mismatch Correction for Bandpass Sampling Four-Channel Time-Interleaved ADCs in Direct-RF Sampling Receivers」(2019)KiharaTakao『IEEE Transactions on Circuits and Systems-I: Regular Paper』66p.2007-2016.