都市の中で自然を感じる住まい
集合住宅の共用部分は可能性に満ちている。集住の規模が大きければ大きいほど相当規模の共用空間が出現する。住まいの立地や歴史性に合わせた物語をつくって、ライフスタイルを醸成する住む人に誇りと喜びを感じてもらえる空間を提供する。
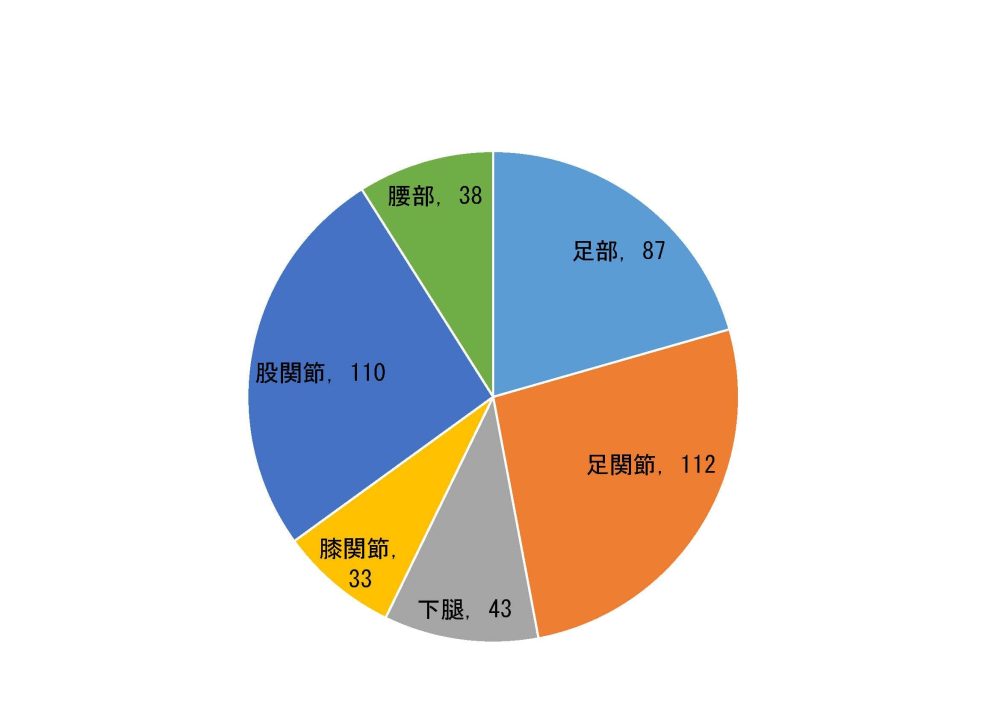
ダンスが必須化され,健康増進を目的としダンスが運動手段として取り入れられるようになったことで,日本におけるダンス人口は増加傾向である.しかし,ダンスは長年芸術性を重油視してきたため,として認識されてきたため,医科学的な視点での介入は少なく安全性への配慮はまだ整っていない.また,障害発生の多さはこれまでの研究で明らかになっているにも関わらず,その要因は不明の場合が多い.ダンス動作やダンス受講者の持つ特性を評価し,障害発生状況を調査することで,安全に対する指針や,障害予防の基盤を構築する.

研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム