光無線融合通信技術を用いた5G MIMO信号中継伝送システム
工学部
電子情報システム工学科
情報通信研究室
周虹
教授
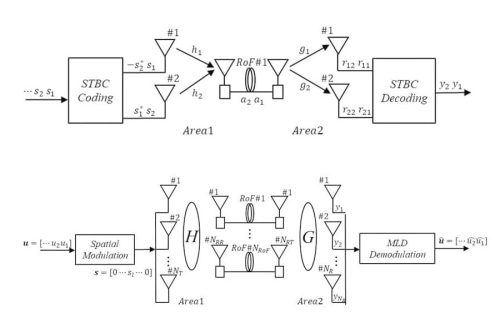
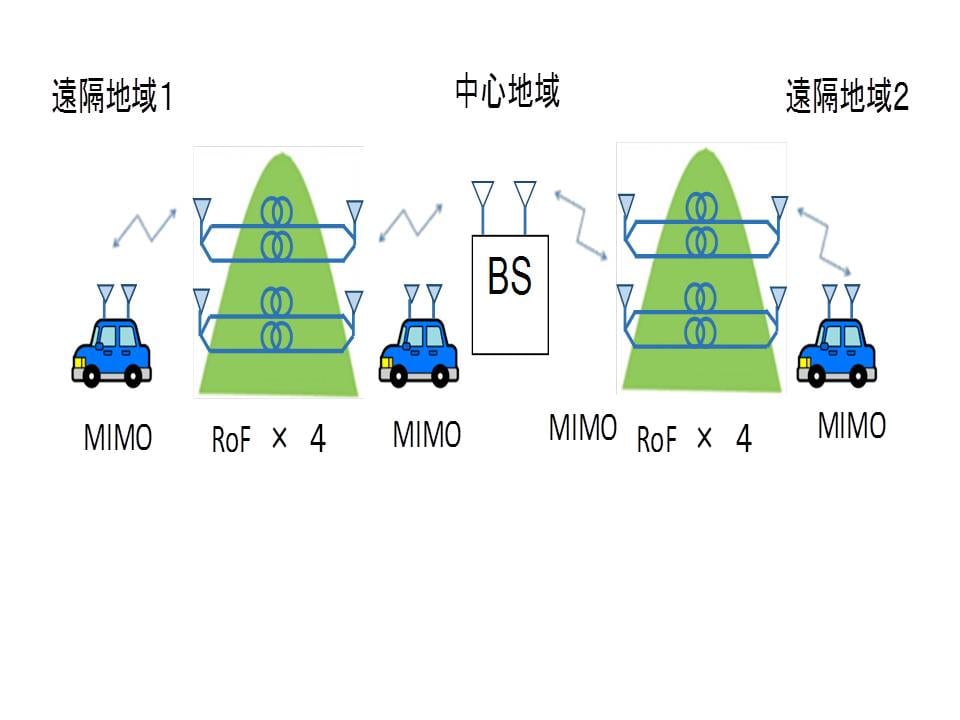
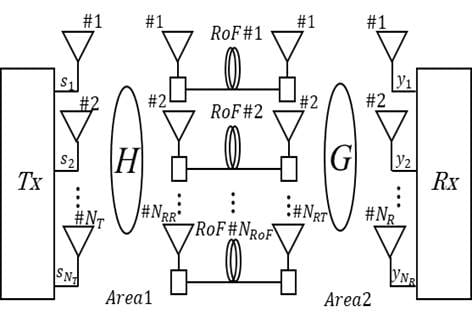
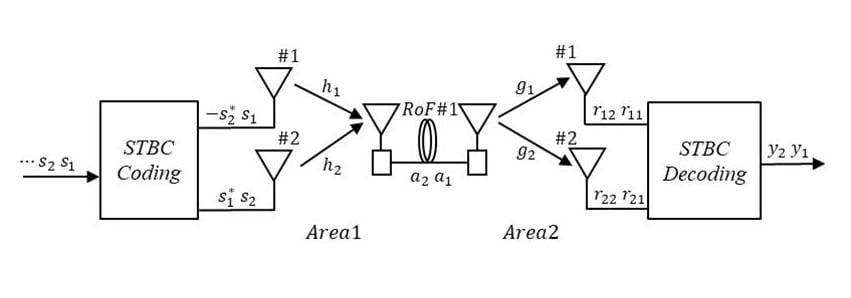
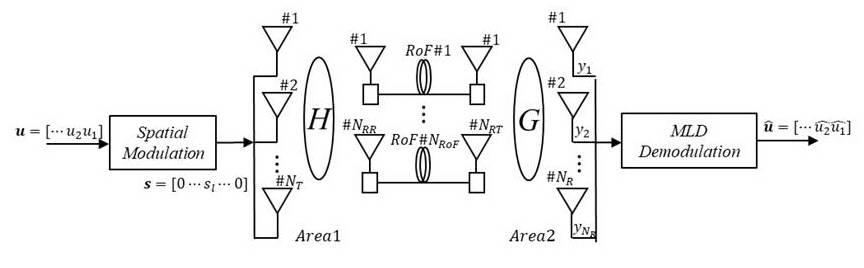
1本或いは少数本のRoF(Radio on Fiber)リンクで超高速5G MIMO無線情報信号を中継することにより、特に僻地や過疎化地域における5G基地局の設置数を減らし、5Gネットワークの構築及び運営コストを削減して、僻地や過疎化地域への5G通信サービスの普及に貢献します。
論文
「A Novel Relay Transmission System Combining STBC-MRC and RoF」(2015)AlhababiAbdulsatar『Proc. of 2015 International Workshop on Electromagnetics (iWEM2015)』
「Proposal and Analysis of Novel Fiber-optic Relaying Schemes for MIMO Mobile Communication」(2017)KumamotoKazuo『Proc. of IEEE 2017 International Topical Meeting on Microwave Photonics (MWP2017)』p.1-4.
「A Study on Fiber-Optic Relaying Scheme Using Spatial Modulation for MIMO Transmissions」(2018)KitamuraIkuya