IoTを活用した子育て支援に関する研究
我が国では,少子高齢化が進み,介護や子育ての肉体的,心理的,経済的な負担感の増大が課題となっている.中でも,排泄時のおむつ交換は,不定期に発生することと衛生面の問題から早期に解消することが必要であり,そのタイミングを検出することが求められている.こうした背景の下,本研究では,IoTデバイスと空気の成分を計測する臭気センサを用いて,おむつ交換のタイミングの検出と可視化を試みる.
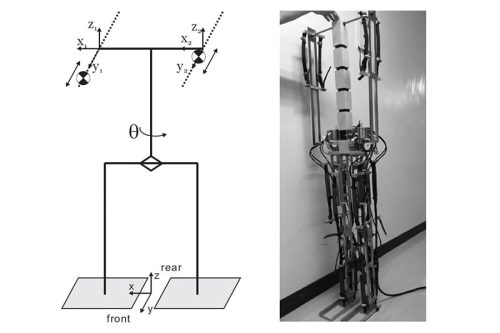
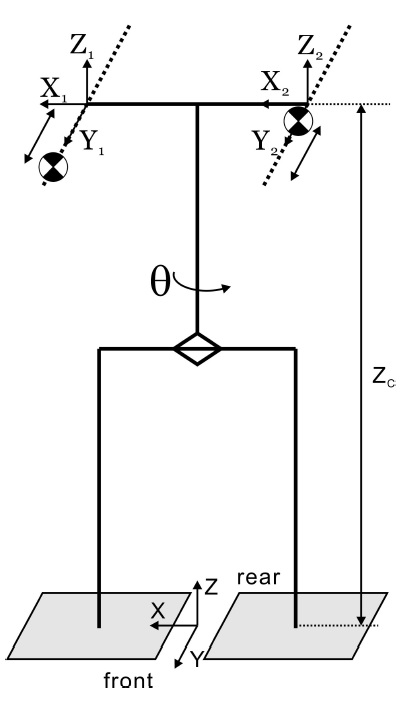
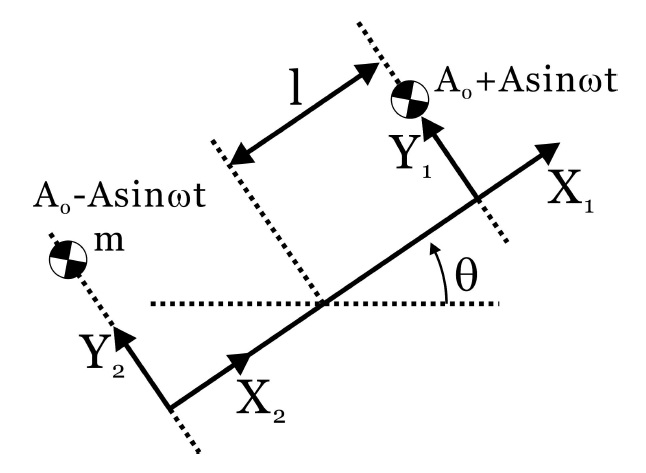
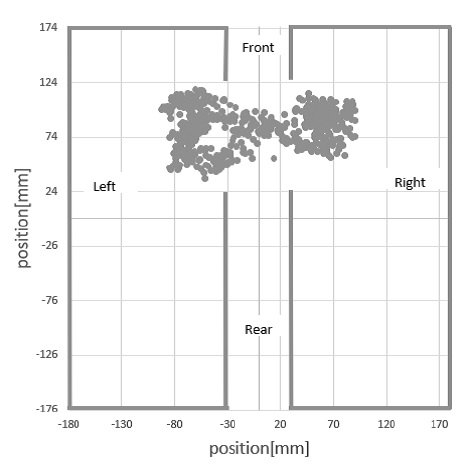
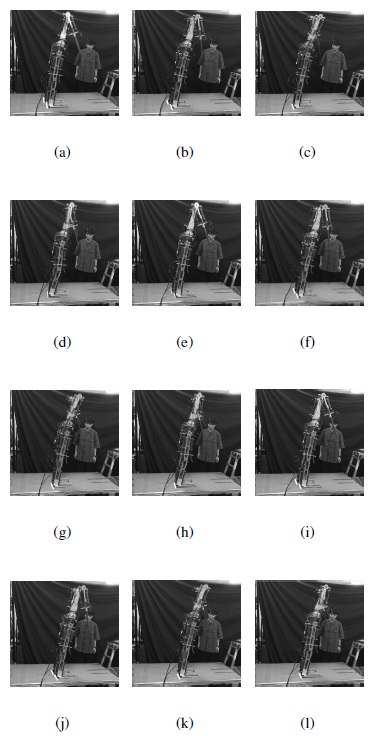
動物の四脚歩行と異なり,ヒトの二脚歩行は力学的に不安定なものです.体幹や腕部といった質量の大きな部位が脚の上にあり,これを転倒せずに片足で支える制御は大変難しいです.本研究ではこれら上半身を制御の安定性を阻害する要素と考えるのではなく,「うまく上半身を動かすことで歩行を促進できないか?」と考え,そのメカニズムの解明と検証を行います.検証では上半身をバネ要素を持つ柔軟体幹と前後に質点を移動させる腕パーツに近似し,歩行の安定指標である床反力中心が腕振り運動を調整することで操作可能であることを数理的に示しました.またこのことを検証するために実機を試作し,腕振り運動により床反力中心が歩行をしやすいように移動していること,それにより歩行が可能であることを確認しました.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム