
イオン選択性電極
金属イオンは、生体内で、水分調整や代謝などに大きく関与しています。当研究室では、社会の求める実用センサーを目指し、「目的のイオン・分子だけを認識・識別する認識化合物」を設計・合成しています。 そして、実際に用いられているイオン選択性電極としての性能評価や、センサー部の物性評価法の開発を行っています。
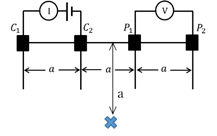
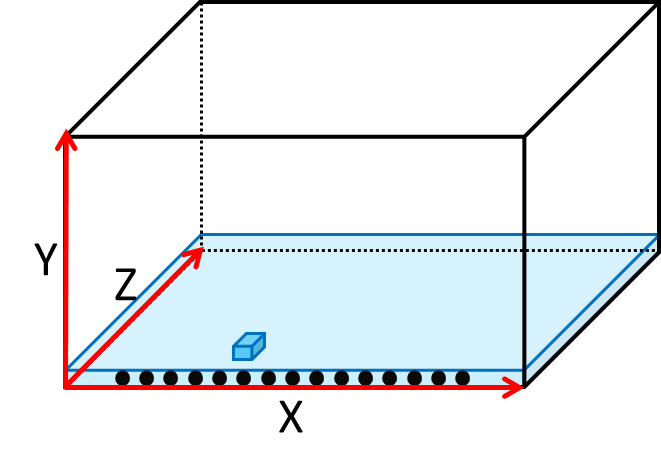
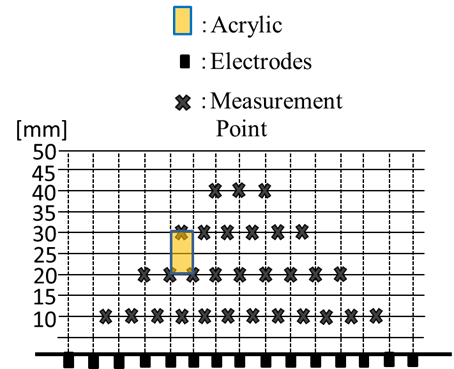
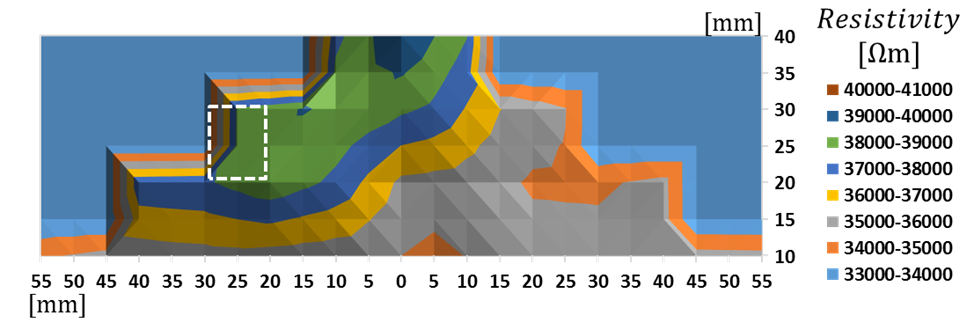
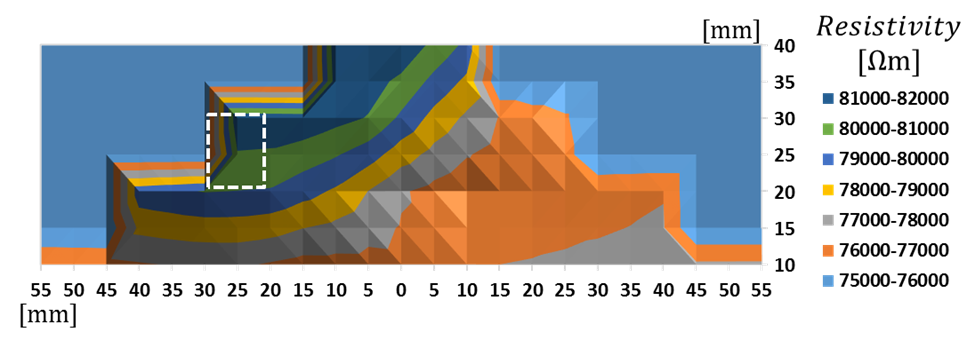
体表面電位分布を計測するために開発した小型電極アレイを用いて,簡単に体内のインピーダンス分布を低侵襲的に計測する技術の開発を行っている。通常のインピーダンスCTのように多数の電極を体表面に配置するのではなく,簡単に着脱が出来る小型電極アレイを計測に用い,地質調査の分野で使用されている電気探査法を利用して内部のインピーダンス分布の再構成を行う。現時点ではまだ,生体の計測には至っていないが,電解液中に導電性ゲルを配置することで人体のインピーダンス分布を模擬し,計測のシミュレーション実験を行っている。また,有限要素法による解析も行い,実験結果と比較を行い,測定精度が分布形状に依存して変化することなどを明らかにしている。
論文
「電気探査法による生体インピーダンス計測の模擬実験」(2018)『電気学会論文誌C』138p.1341-1347.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム