
医師と協働する手術支援マニピュレータ
本研究室では,患者の傍から近接操作でき,医師と共存協調する手術支援ロボットを,医工・産学連携で研究しています.執刀医が一人で行えるロボット支援手術が実現すれば,少ない医療スタッフでの手術が可能となり(感染症対策,外科医の働き方改革,大規模災害),患者は地元病院で手術を受けられ,診療科の偏在の縮小,医療費の低減にもつながります.
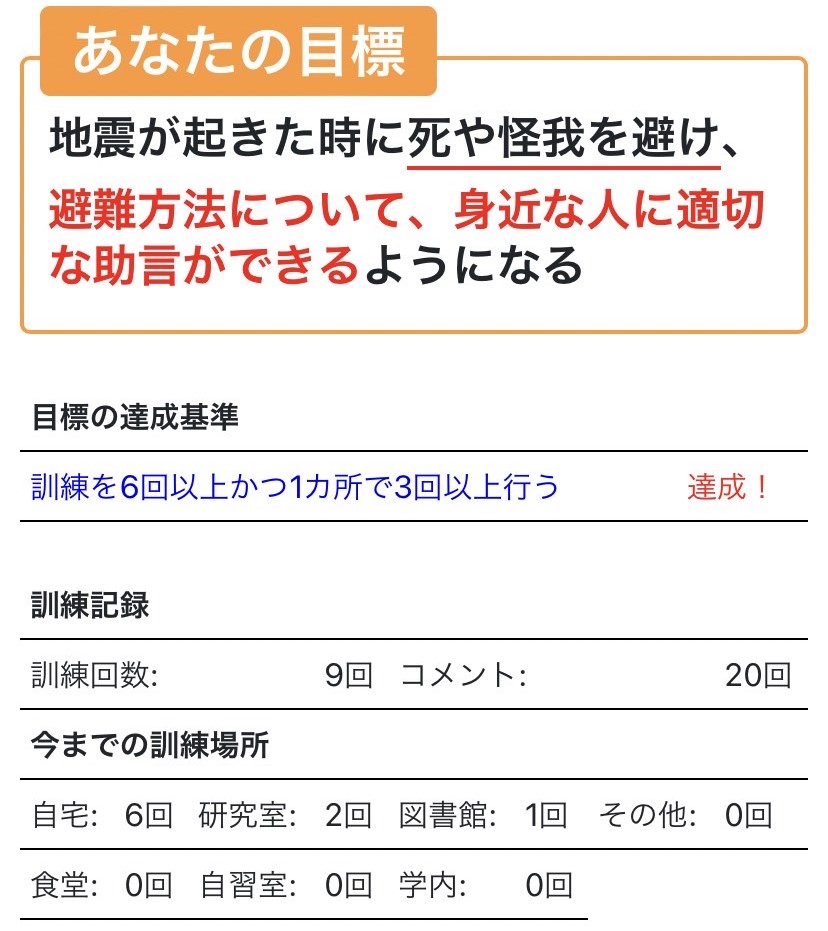
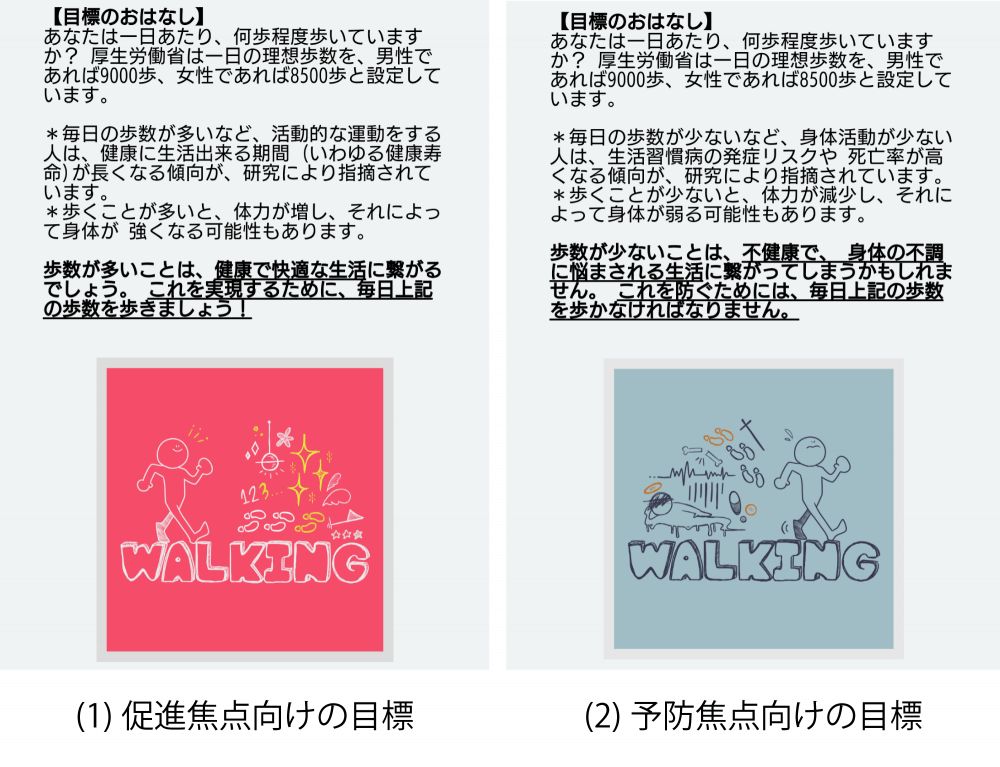
制御焦点理論を活用した動機づけ支援を行う情報システム(避難訓練支援,運動支援)の研究開発を行っている.制御焦点理論は心理学で研究されている人の志向性(考え方の特性)に関わる理論である.人々を志向性のグループに分け,それぞれに適した支援を行うことで各場面での動機づけを行っている.本研究では,心理学分野の知見を活用した情報システムの研究を行っている.
論文
「利用者の予防焦点傾向を考慮した避難訓練支援システム」(2025)『情報処理学会論文誌』66(2)p.455-463.
「損失回避を考慮したフィードバックを行う運動支援システムの開発」(2025)『情報処理学会,DICOMO2025シンポジウム』p.1527-1533.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2026 智と技術の見本市.