ウォーカビリティの概念に基づく歩行空間の分析
工学部
都市デザイン工学科
空間情報学研究室
木村優介
准教授
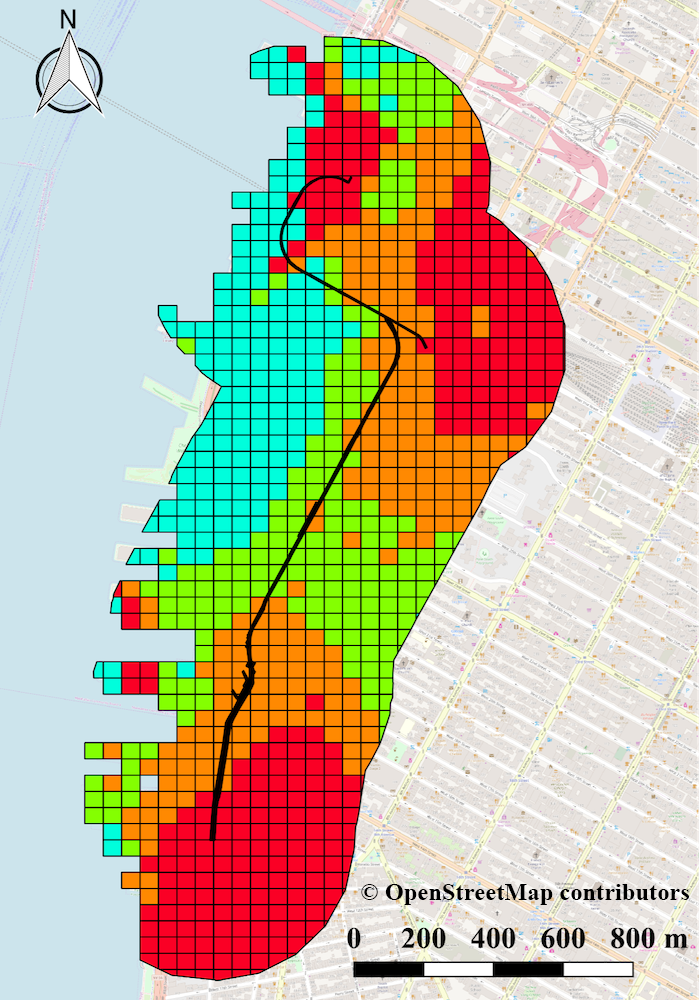
都市の賑わいや健康的な暮らしといった観点から、都市内の歩行空間の充実が都市政策上も重要な課題となっています。特に健康状態に関連のあるとされる身体活動量の増加に寄与するため、利用者数の増加だけではなく、歩行空間の近隣の居住者の歩行活動の増加に着目することが、歩行空間整備の評価にあたって重要となります。そこで、歩行に適した生活環境を表すウォーカビリティ(Walkability)の概念と、その評価指標の一つであるWalkability Indexに着目し、都市内の歩行活動量のポテンシャルを客観的にかつ面的に把握できる手法の開発を目指しています。
論文
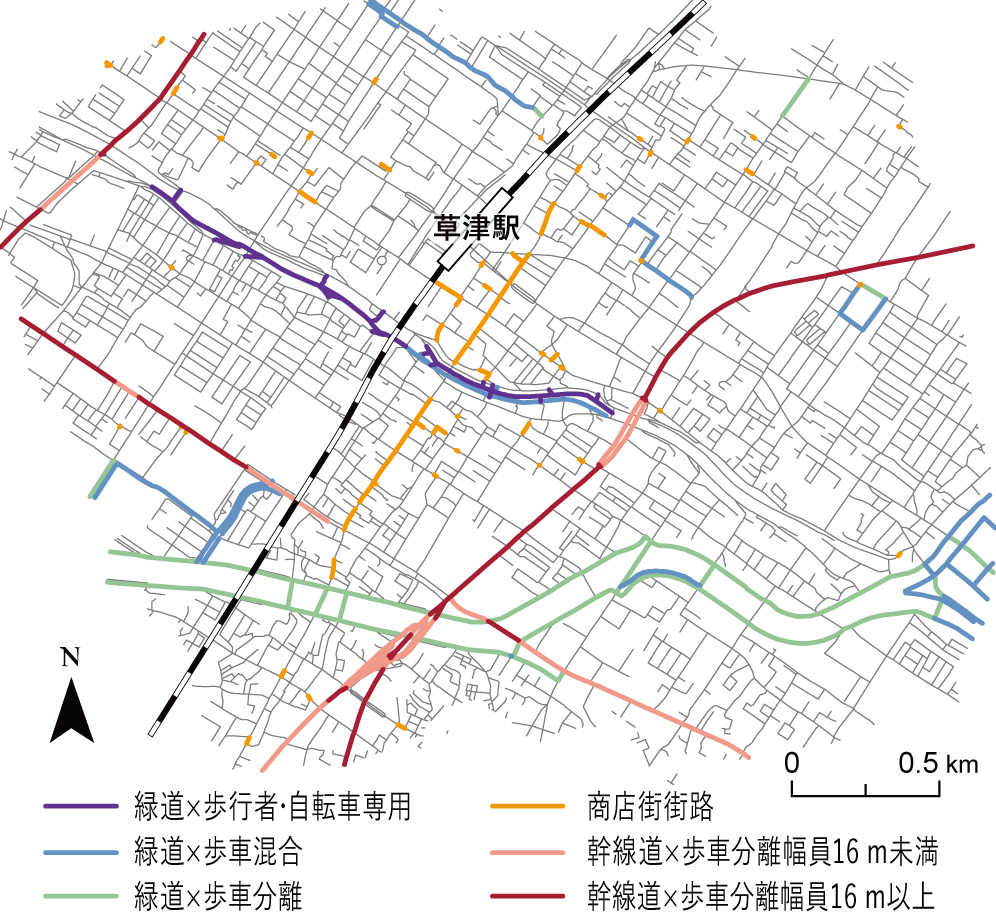
「街路特性と目的別歩行活動量との関連分析:Walkability Indexの観点から」(2022)木村優介『土木学会論文集D3』77(5)p.I_395-I_405.
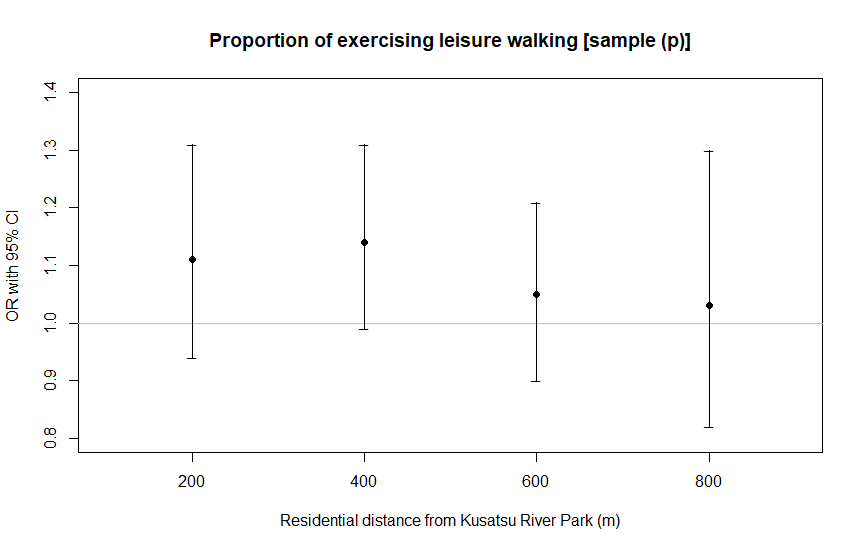
「歩行空間の整備と近接性が周囲の住民の歩行活動に与える影響」(2022)ガリグ誠樹『土木計画学研究・講演集』66p.7266.
「An Evaluation of the Effect of the Construction of Walking Spaces on their Neighborhood Environments Using Walkability Index: with a Focus on the Reuse of Discontinued Railroads」(2018)WatanabeKento『Proceedings Asian Conference on Remote Sensing 2018』1p.71-78.