
熱電発電に必要な高性能 n 型熱電フィルムを開発
未利用の排熱から発電する熱電発電技術に関して、大気安定な塗布膜としてはこれまでで最も高い性能をもつ有機系n型熱電フィルムの開発に成功しました。n型半導体の材料の水分散液にエチレングリコールを添加剤として加える独自の環境調和型の手法を開発しました。多様な形状に貼り付けて利用する柔らかい熱電変換素子としてIoT社会への貢献が期待されます。
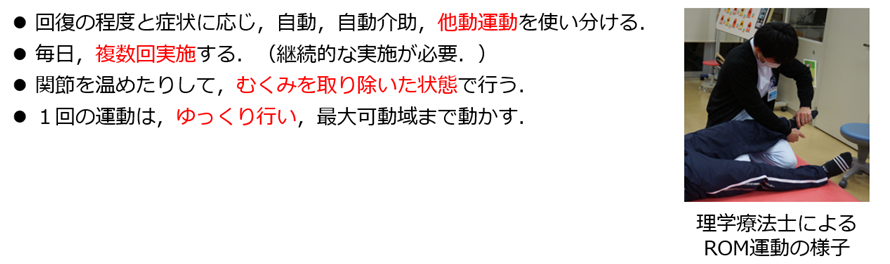
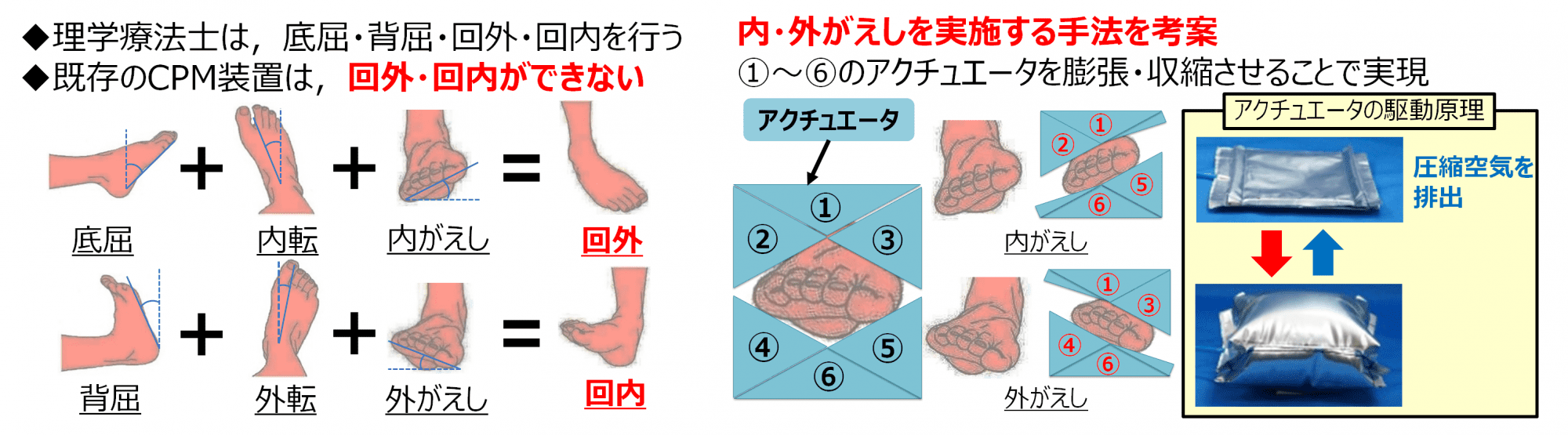
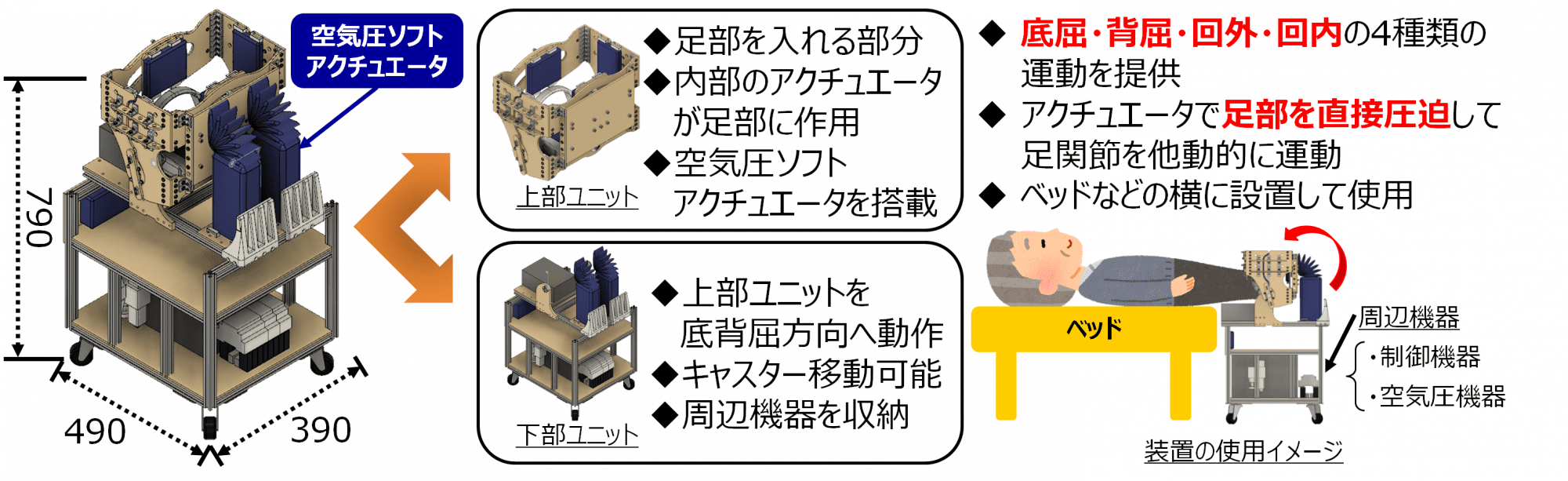
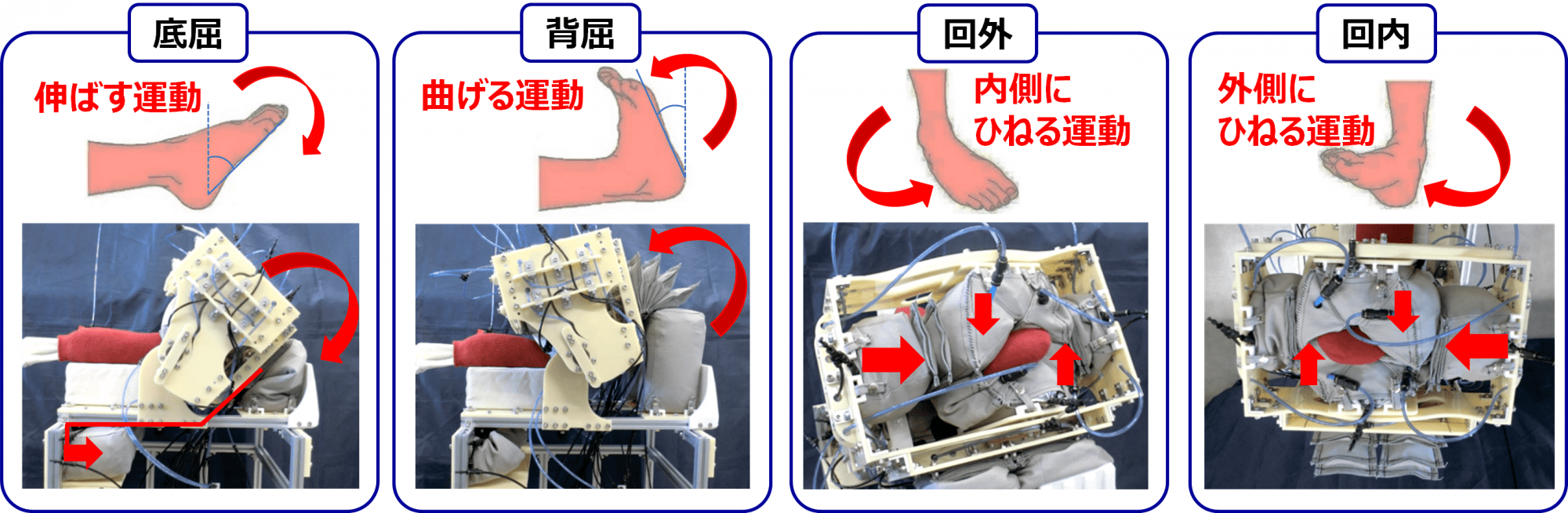
拘縮とは,関節の柔軟性が失われた状態であり,発症前に予防することが重要である.拘縮の予防方法として,理学療法士による関節可動域(Range of Motion : ROM)訓練が実施される.しかし,高齢者の福祉施設や,通所リハビリテーションの事業所など,介護の分野における理学療法士の不足が指摘されている.そこで本研究室では,理学療法士に代わってROM訓練を行う運動装置の開発を行っている.本研究では,独自に開発した空気圧ソフトアクチュエータを用いることで,足関節のROM訓練やストレッチ運動など多様な動作を実現できるリハビリテーションシステムについて紹介する.本アクチュエータの柔軟性を利用することで,患者に対して安全で予防に必要な多様な動作を提供できる点が特長である.
論文
「Development of ROM Device for Ankle Joints using Pneumatic Soft Actuators」(2018)『Proceedings of International Conference and Exhibition on New Actuators and Drive Systems (ACTUATOR18)』
「ソフトアクチュエータを用いた足関節の多自由度他動運動装置の開発」(2018)『日本機械学会2018年度年次大会講演論文集』S1110401
「Feasibility Test of Range of Motion Exercises for Ankle Joints Rehabilitation Using Pneumatic Soft Actuators」(2016)『Lecture Notes in Electrical Engineering』345
特許
特願2018-069019 「足関節・足部の運動支援装置」
特願2020-017922 「足関節の運動装置」
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2025 智と技術の見本市.