
メカトロニクス技術を活用したリハビリテーション機器の開発
メカトロニクス技術や機構設計を活用したリハビリ介助機器を研究開発しています.脊髄損傷者向けの階段昇降可能な車椅子や,高齢者などを対象とした持ち手が移動可能な新型歩行器,免荷式アシストスーツといった,使用者の移動を支援する機器をはじめとして,脳卒中患者向けの上肢リハビリ支援装置や手指リハビリ装具の開発も行っています.
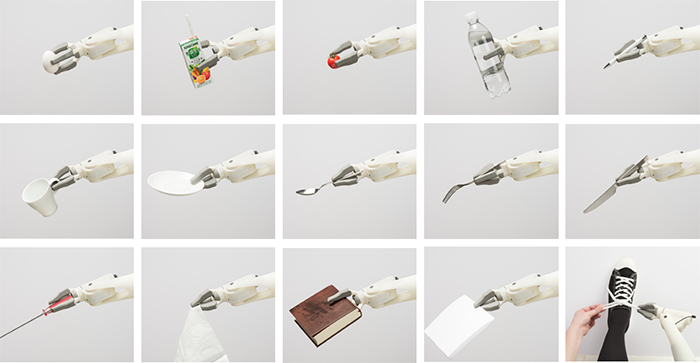
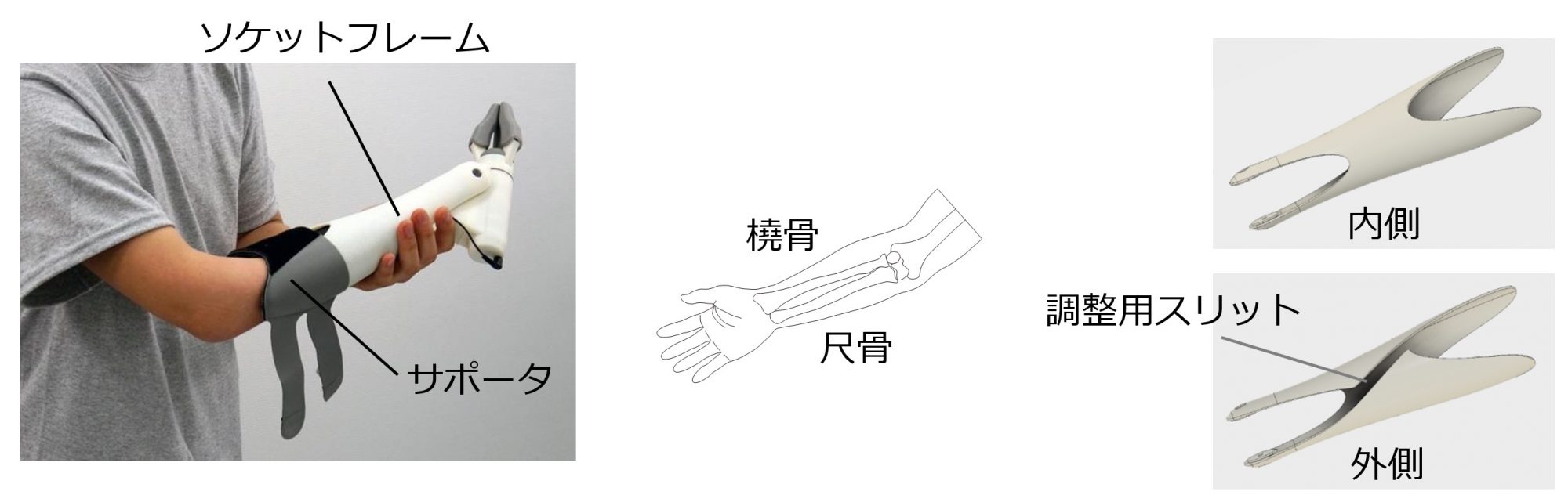
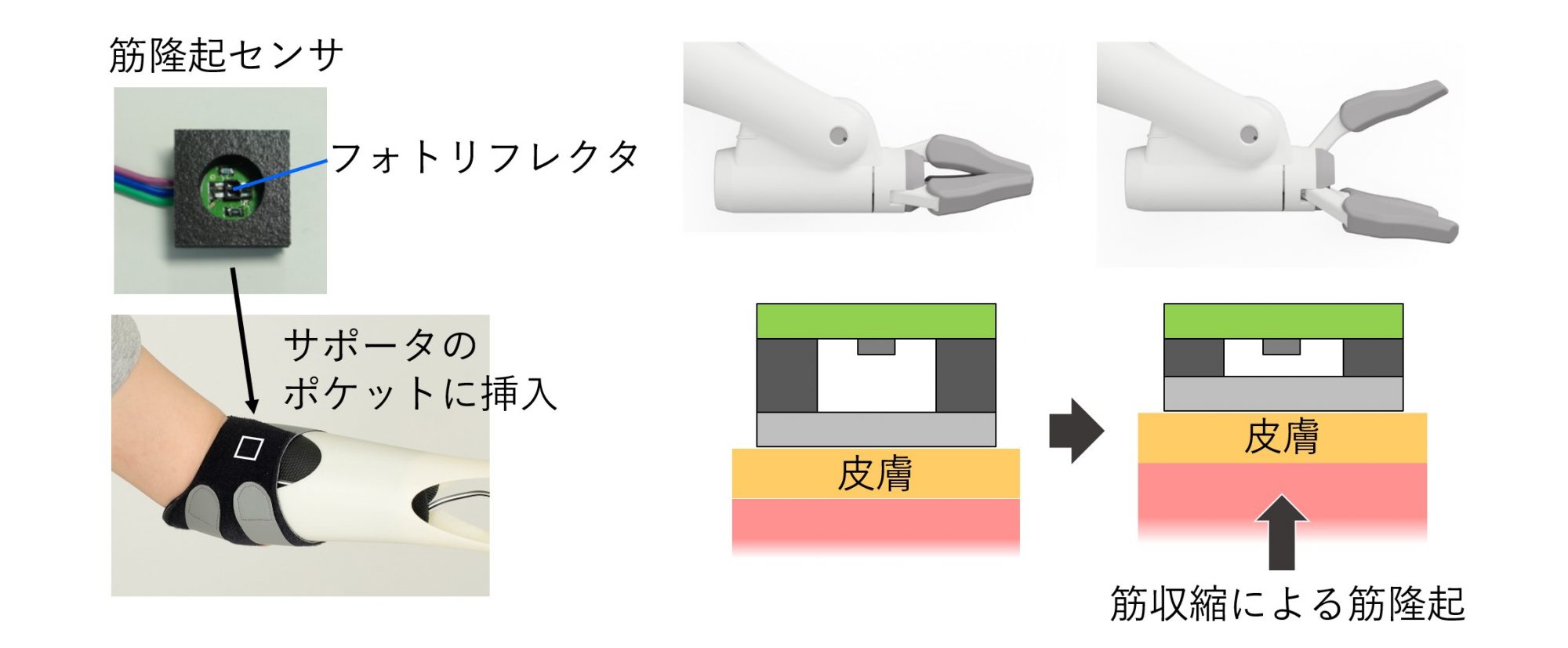
筋隆起センシングにより操作する対向3指の電動義手です.様々な日用品を操作できる対向3指ハンド,容易に着脱可能なサポータソケット,筋隆起センサで検出した筋隆起による操作システムが特長です.ハンド,ソケット,筋隆起センサ,それぞれが要素技術として利用可能です.

論文
「機能性とデザイン性を考慮した軽量・低コストの対向3指義手」(2014)『日本ロボット学会誌』32p.456-463.
「Finch: Prosthetic Arm with Three Opposing Fingers Controlled by a Muscle Bulge」(2023)『IEEE Transactions on Neural Systems & Rehabilitation Engineering』31p.377-386.
特許
特許第6172651号
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2025 智と技術の見本市.