科学と宗教を繋ぐ美術
星曼荼羅の二形式すなわち円形式および方形式(図1)の構成要素とその配置に基づく構成原理ならびに成立と展開の解明を研究の中心としつつ、須弥山図(図2)などの絵画作品において、天文学に基づく科学知識と天空への思想がどのように関連して作品として成立しているのかを研究している。
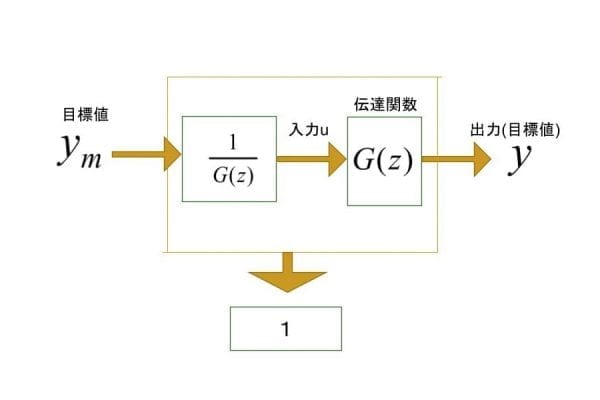
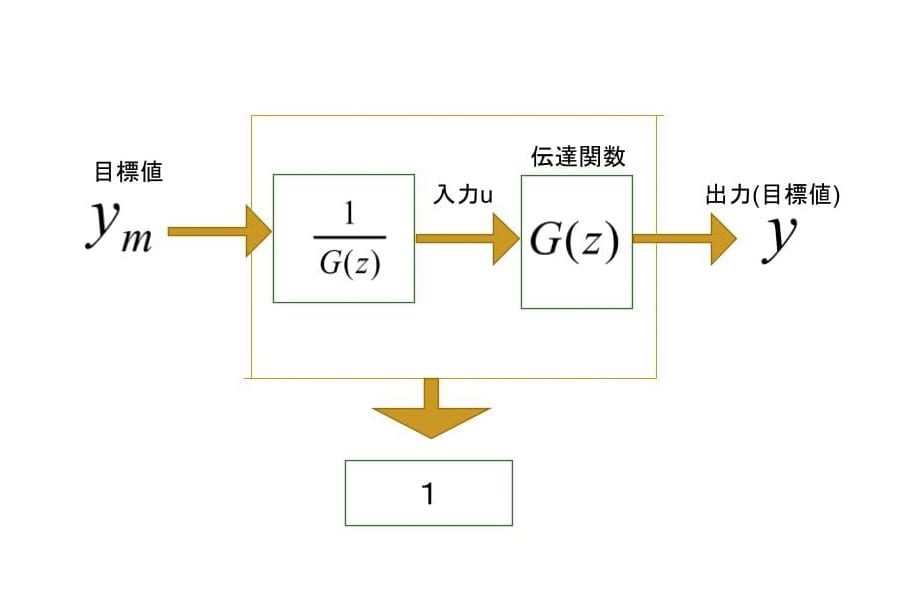
追従制御系を構成する際、制御対象の伝達関数に対して、その逆数を前置補償器として用いる方法が考えられる。この補償器は微分器を含み、その部分をインタラクタという。一入出力系では、インタラクタは伝達関数の相対次数を有する多項式とすればよい。しかし、多入出力系においてはインタラクタは多項式を要素とする行列になり、伝達関数の相対次数以外に、そのパラメータにも依存するため導出も難しい。本研究では、出力数が入力数よりも多い系に対してインタラクタに関連する様々な問題、例えば特異な重みを有するLQ問題の解の陽表現、最大非可観測化問題、状態フィードバックにより逆インタラクタ化、不変零点の計算法などを考える。特にLQ問題に関しては、特殊な重みを用いることによりRiccati方程式の解が容易に得られるのであるが、その解法を(インタラクタと直接関係はないが)状態フィードバックによる有限整定制御、双対問題としての特異な重みを有するフィルタリング問題に応用できる。
論文
「線形離散時間系の特異な重みを有するLQ制御問題について」(2023)『電気学会論文誌C編』143(1)p.76-81.
「Innerization and Singular LQ Control Problem for Linear Discrete-Time Systems」(2023)『Preprints of the 22nd IFAC World Congress』p.1892-1897.
「状態フィードバックによる擬似インナー化制御」(2016)『電気学会論文誌C編』136(12)p.1829-1835.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2025 智と技術の見本市.