非把持双腕ロボットによる摩擦力補償無しでの抱きかかえ制御
本研究では,力学的な本質を失わず,3次元運動を2次元運動に簡略化し,要介護者を二つの関節を持った3リンクの物体とみなす.そして,非把持双腕ロボットアームとリンクの間の静止摩擦を利用し,3リンク物体がロボットアームから滑り落ちないための安定領域を求め,その中に摩擦力が最も小さくなる姿勢を求める.得られた最適な角度を用いて,ロボットの抱きかかえ制御を行い,3リンク物体の安定支持が実現できることを示す.
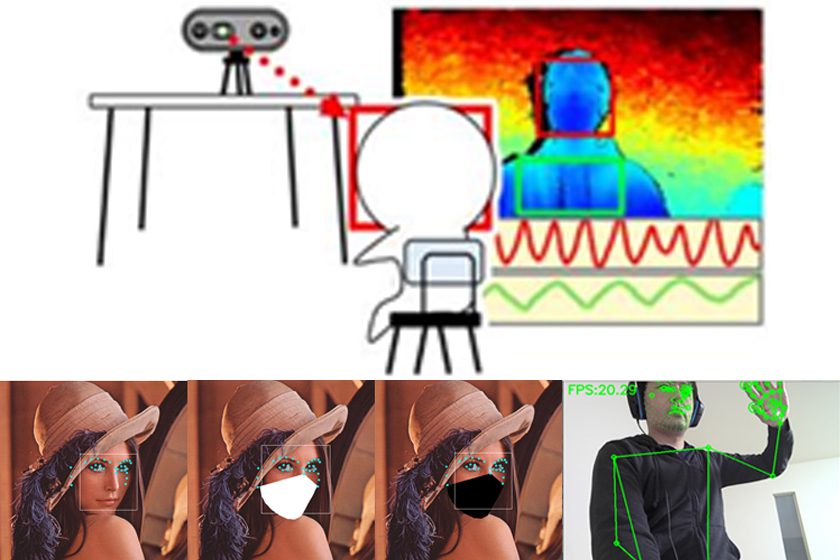
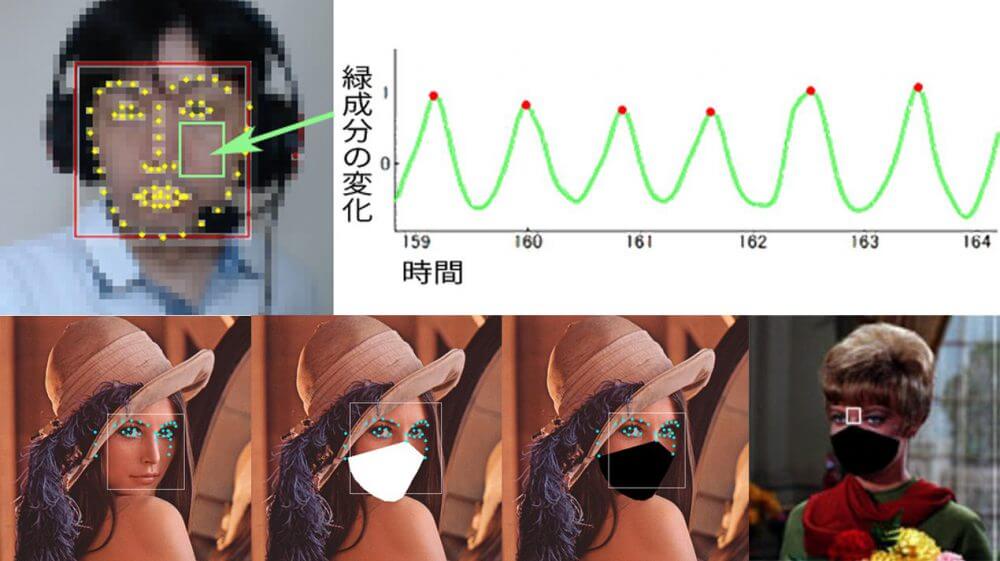
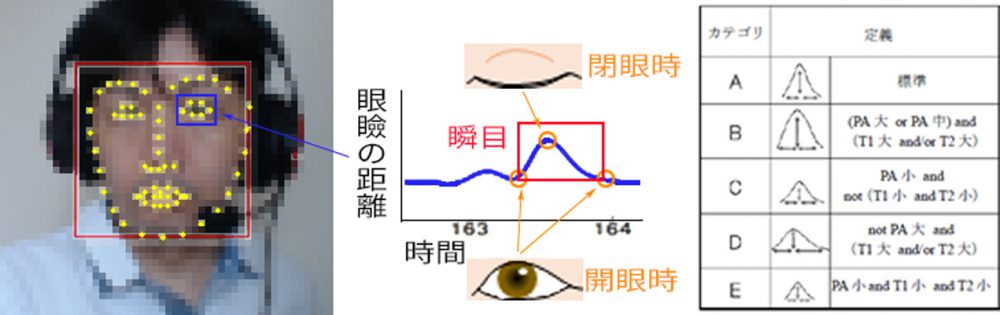
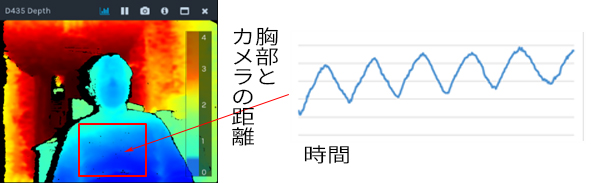
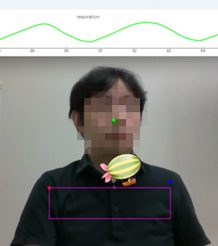
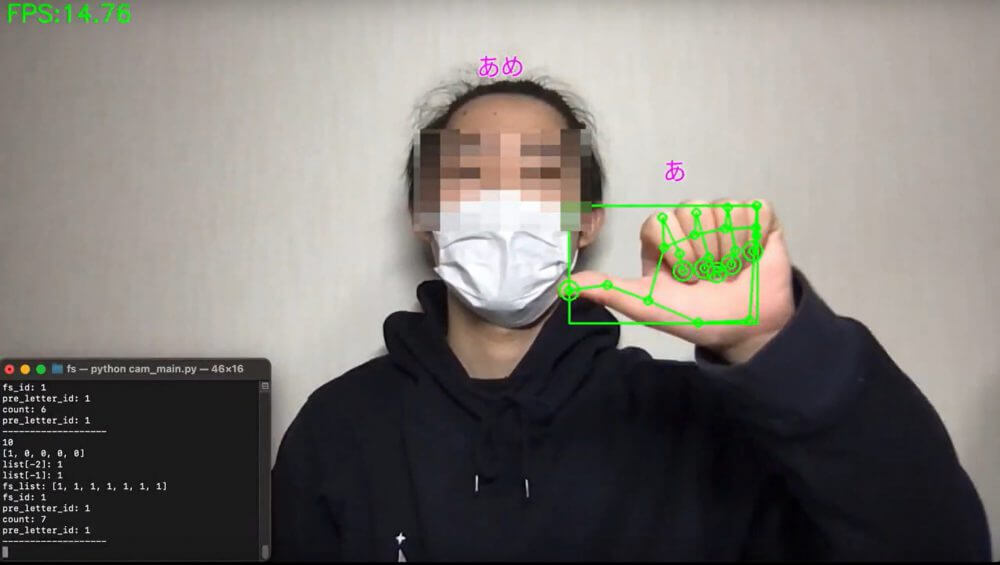
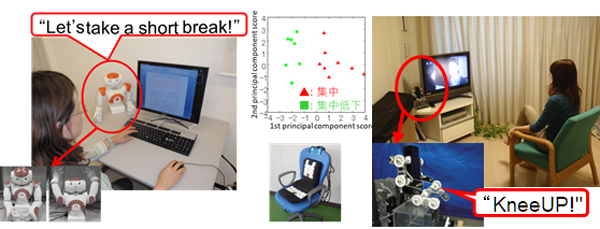
カメラの映像から顔や顔のパーツ,身体の動きを検出して生体信号を計測したり,計測した情報を応用するシステムを作成しています.また,計測したデータが,実際のセンサで計測したデータとどのくらい一致するのか,どんな風に違っているのかについて比較,解析しています. カメラを用いたウェアレス(非接触)での計測とその応用について検討しています.

論文
「Contactless and Low-Burden Measurement of Physiological Signals and Comparison of Obtained Indices」(2021)『Proceedings of the 21st Congress of the International Ergonomics Association (IEA 2021)』IVp.615-619.
「非接触計測法の拡張と低負担計測による生理信号との比較」(2021)『人間工学』57 (Supplement)p.2G2-3-2G2-3.
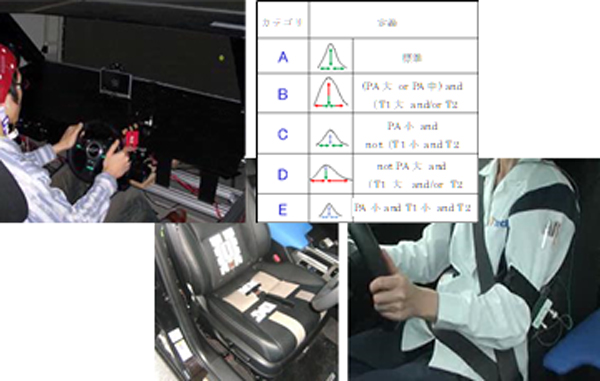
「Estimation of driver’s arousal state using multi-dimensional physiological indices」(2011)『International Conference on Engineering Psychology and Cognitive Ergonomics』p.176-185.
特許
特願2006-142582特許第4864541号
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2026 智と技術の見本市.