非把持双腕ロボットによる摩擦力補償無しでの抱きかかえ制御
ロボティクス&デザイン工学部
ロボット工学科
スマート材料アクチュエータ研究室
姜長安
准教授
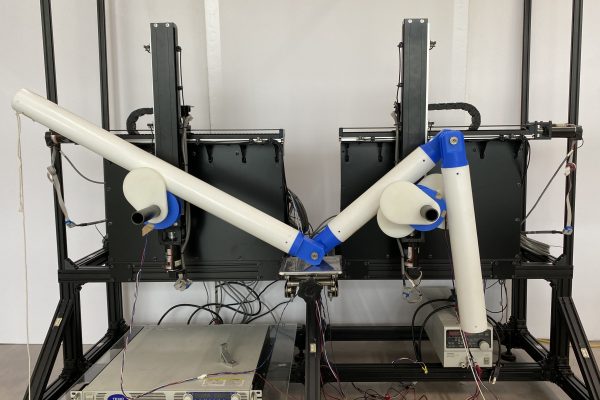
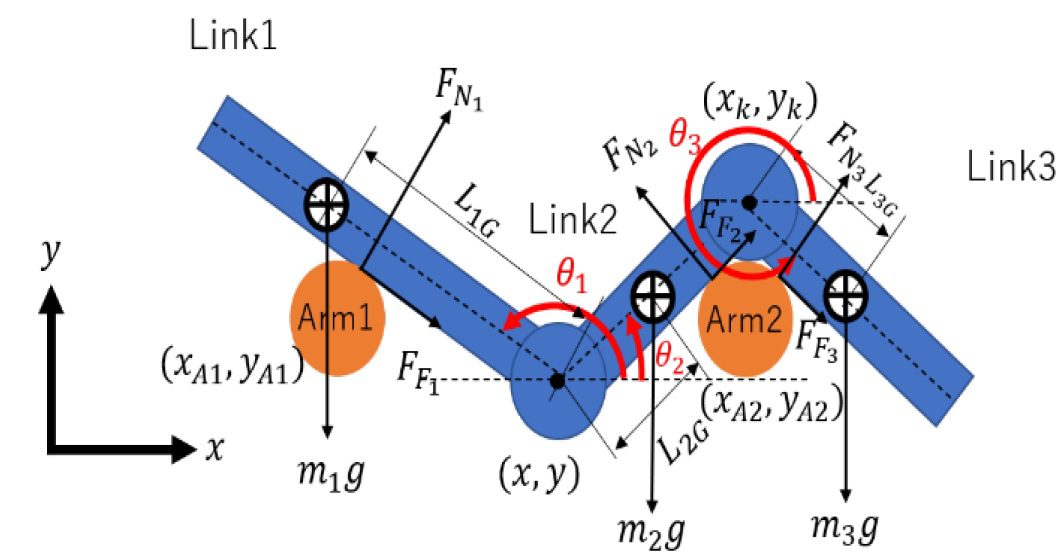
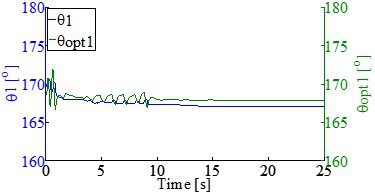
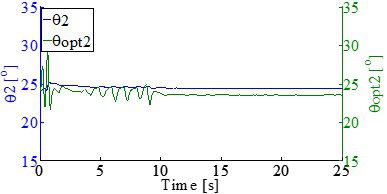
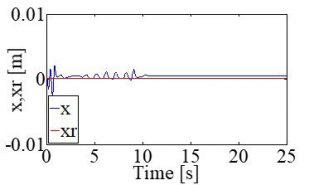
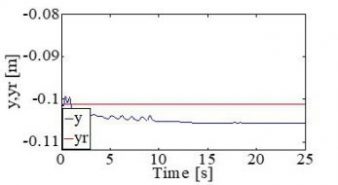
本研究では,力学的な本質を失わず,3次元運動を2次元運動に簡略化し,要介護者を二つの関節を持った3リンクの物体とみなす.そして,非把持双腕ロボットアームとリンクの間の静止摩擦を利用し,3リンク物体がロボットアームから滑り落ちないための安定領域を求め,その中に摩擦力が最も小さくなる姿勢を求める.得られた最適な角度を用いて,ロボットの抱きかかえ制御を行い,3リンク物体の安定支持が実現できることを示す.
論文
「Posture maintenance control of 2-link object by nonprehensile two-cooperative-arm robot without compensating friction」(2019)JiangChangan『IEEE/CAA Journal of Automatica Sinica』6(6)p.1397-1403.
「Development of a 2-link object with viscous joint for imitating care-receiver’s body」(2022)JiangChangan『Proc. of the 2022 International Conference on Advanced Mechatronic Systems』p.128-131.