
マルチエージェントを用いた避難シミュレーションツールの開発
近年、豪雨災害や地震災害が連続しています。対象地域から来街者全員が円滑に避難を完了できるかについては、個人ではなく、群集としての避難行動を把握する必要があります。本研究室では、地域に応じた防災・減災メニューの検討を支援するため、群衆を対象とした避難シミュレーションを取り込んだ複数の避難誘導案や施設整備案の効果を比較・評価するパッケージを構築しています。
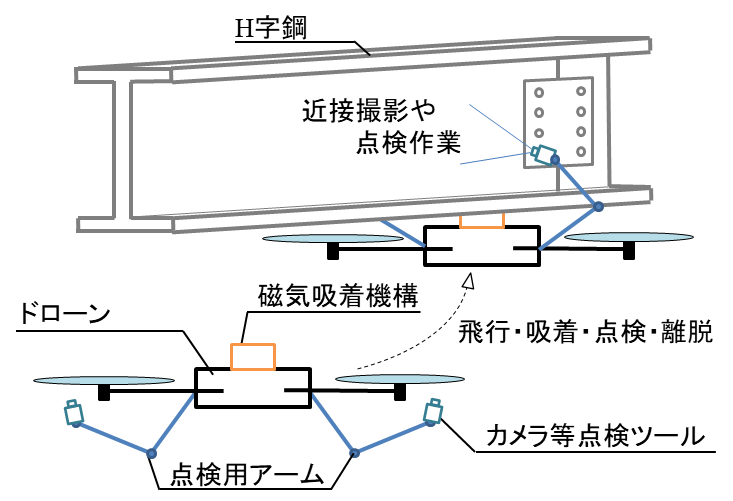
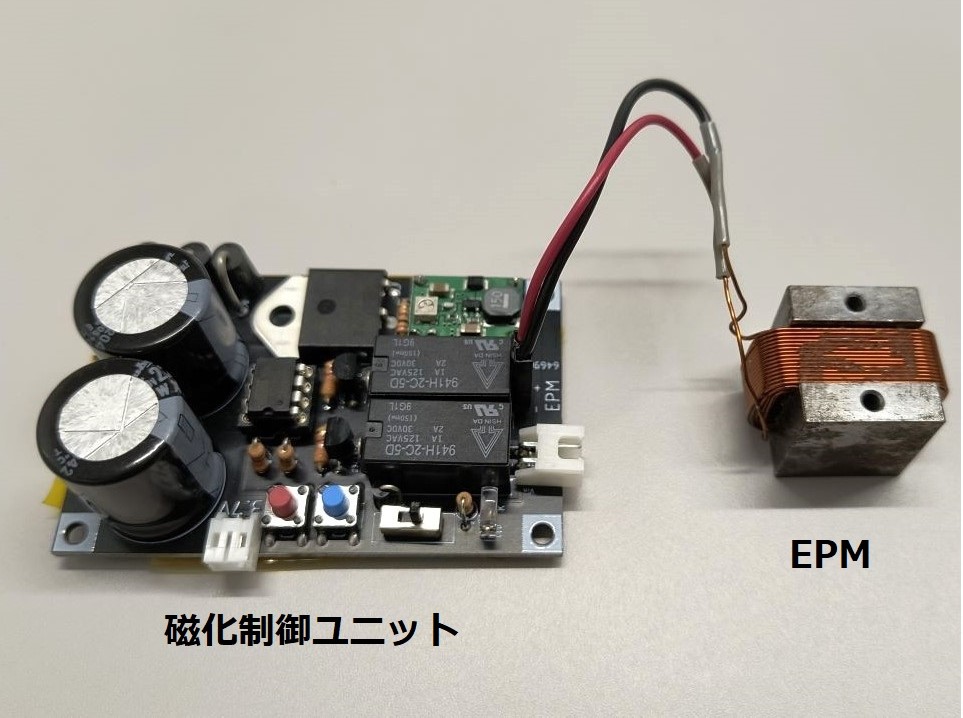
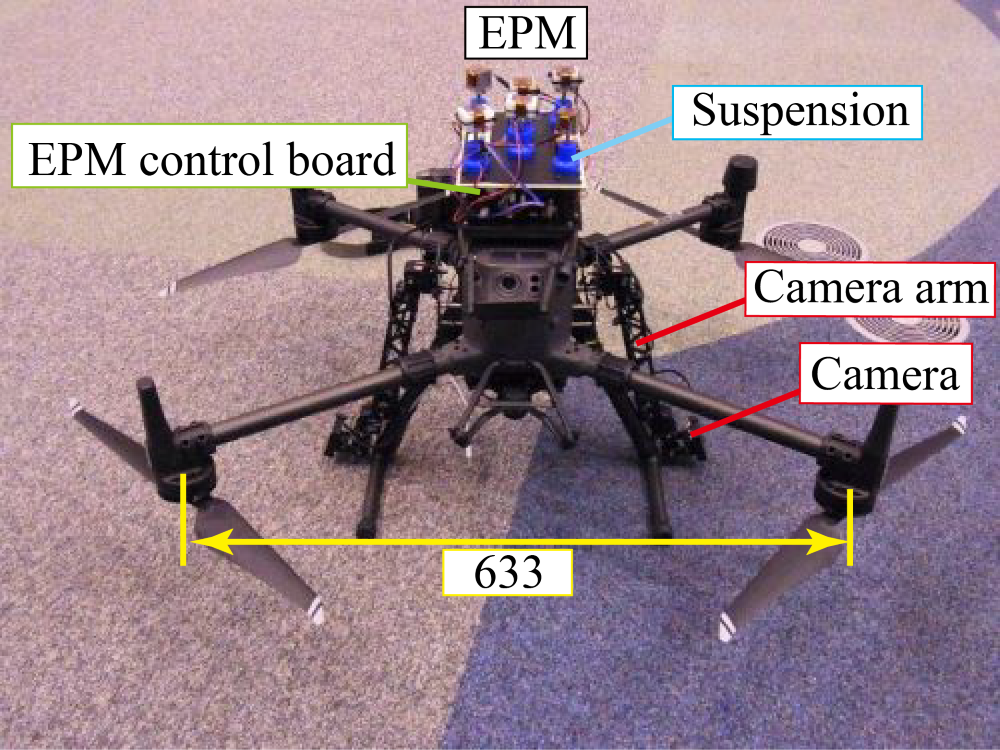
日本のインフラ構造物は多くが高度経済成長期に建設され,老朽化が進んでいますが,点検には足場や専門技術が必要であるため,ロボットによる保守・点検作業の効率化が必要とされています.特にドローンは高所点検に適しているものの,ロータを常時回転させるためバッテリーの消耗が課題となっています.本研究では,バッテリーを消費せず橋りょう等の鋼製構造物に吸着でき,離脱の制御も容易な磁気吸着ユニットを搭載した点検用ドローンの開発に取り組んでいます,
論文
「Attractive Force Estimation of a Magnetic Adsorption Unit for Inspection UAVs」(2021)『Journal of Robotics and Mechatronics』Vol.33, No.6p.1349-1358.
「Reliable Activation of an EPM-Based Clinging Device for Aerial Inspection Robots」(2019)『Journal of Robotics and Mechatronics』Vol.31, No.6p.827-836.
「Verification of an EPM system for an Aerial Inspection Robot and Close-up Image Shooting」(2016)『Advanced Experimental Mechanics』1巻p.179-184.
特許
特願特願2020-201561特開特開2022-89281「吸着状態判別装置、吸着状態判別装置を備える吸着装置、吸着装置を備える無人飛行体またはロボット、吸着状態判別方法、吸着装置の制御方法、および、吸着状態判別プログラム」
特願特願2019-137035特許第特許7235618号特開特開2021-021594「吸着力推定方法、吸着力推定装置、および、吸着力推定プログラム」
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2025 智と技術の見本市.