ROSを基盤とした研究、開発用の移動ロボット
移動ロボットの開発では、信頼性確保のために新規モジュールの開発は上位の各種ソフトウェアモジュール、スタック、ツール群を含めると膨大なコストとなる。ROS2を活用することで、きちんと動作する、独自ハードウェアロボットの実装が容易となる。本AGVにアームを搭載したモバイルロボットの実装を目指している。
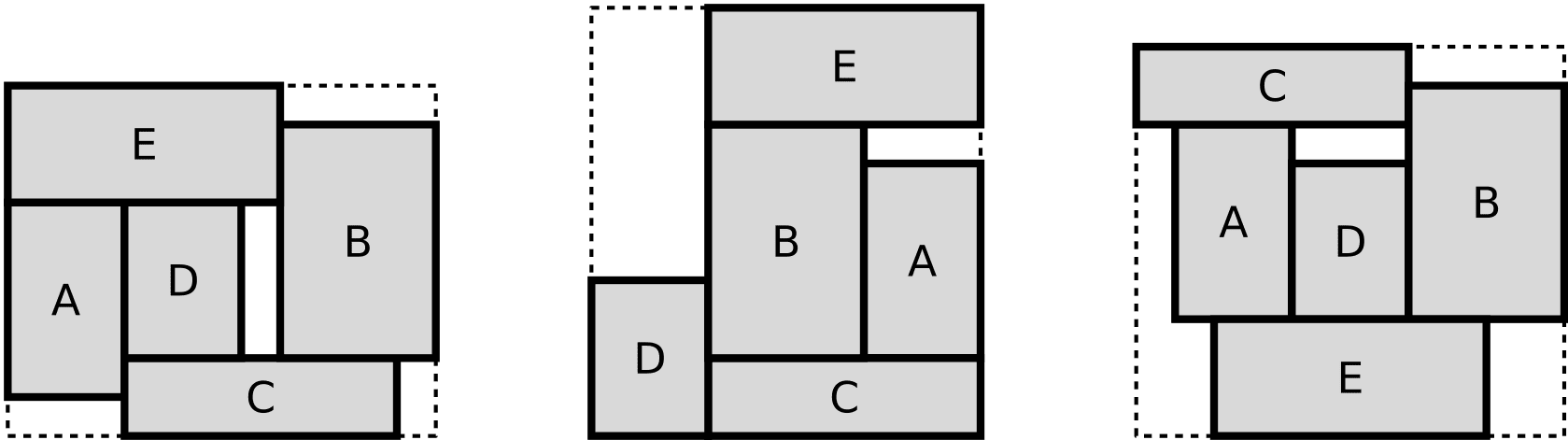
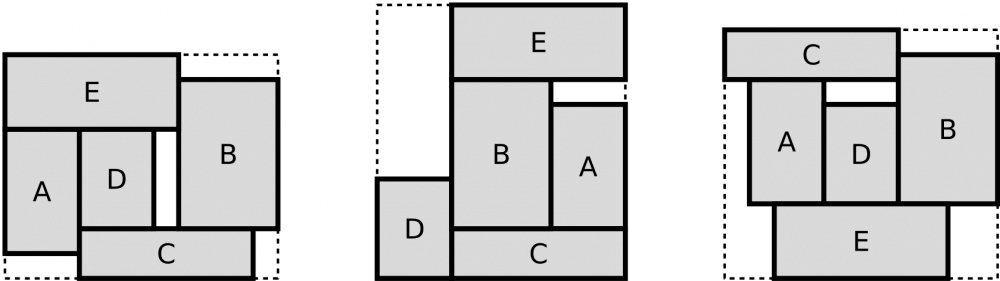
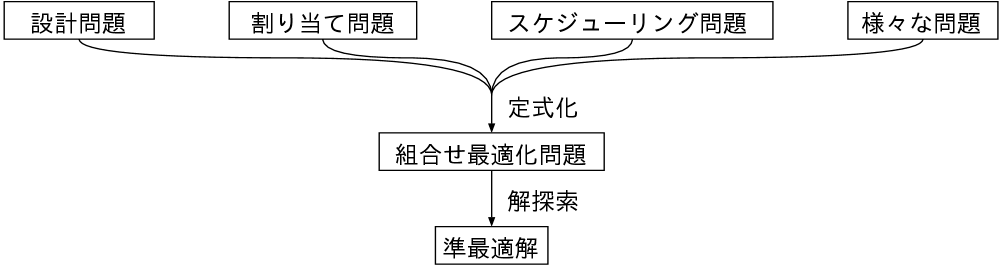
設計、割り当て、スケジューリング等、様々な問題は組合せ最適化問題として定式化できる。しかし、実応用において厳密に最適な解を求めるのが不可能な場合も多い。そのような状況においても可能な限り良質な解を探索するために、これまでにも遺伝的アルゴリズムのような手法が提案されているが、万能ではない。本研究では、特に超大規模な組合せ最適化問題を対象とし、確率論、統計論的な観点から、最適と考えられる方法を追究している。
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2026 智と技術の見本市.