新設&既設橋梁の性能評価に関する研究
工学部都市デザイン工学科・コンクリート構造学研究室,コンクリート工学研究室ならびに橋梁工学研究室は,八幡工学実験場・構造実験センターにて,1) 新設橋梁,2) 維持管理,3) 想定外(火災),4) 長期挙動の4テーマに関して,自主研究,企業との委託,共同研究を行っています. ここでは,その研究成果の一部について紹介します.
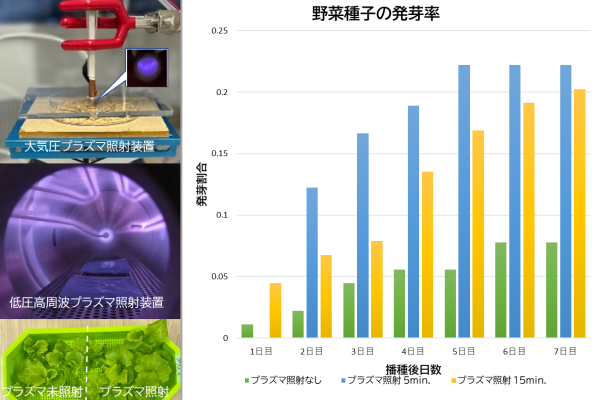
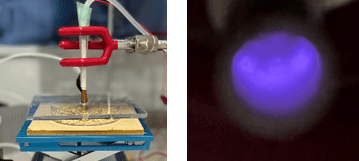
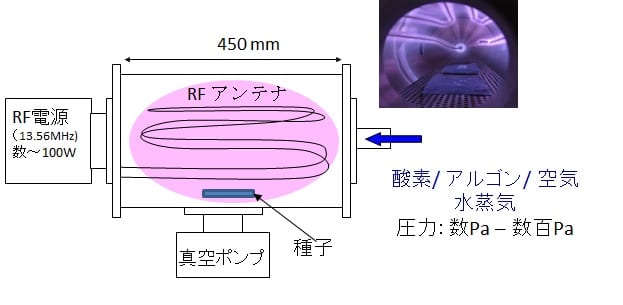
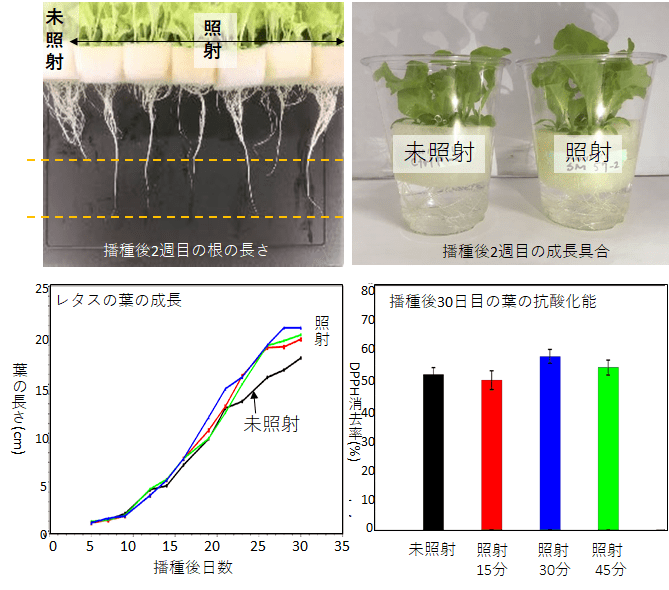
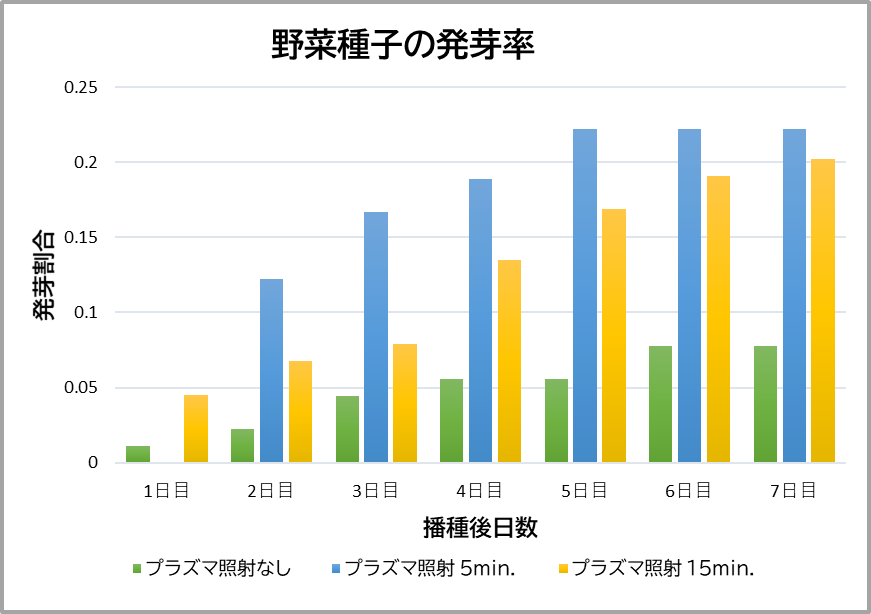
プラズマを植物種子に照射すると、発芽率の向上や成長促進、機能性の改善効果などが見られます。これは、気体を電離させてつくるプラズマが多量に含む化学的活性の高い粒子(活性種)が生体にとりこまれて細胞にはたらきかけるためと推測されています。したがって、植物への適切なプラズマ照射は、近年の食の安全性への関心や、健康志向による機能性食品の需要増に応えることできると期待されます。本研究では、植物種子等の生体表面にプラズマ照射を行うことで、種子表面の殺菌や、成長の促進、鮮度保持、機能性の向上等を目指しています。
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2025 智と技術の見本市.