キノコの機能を成分化学的に解明する
きのこは古くから万病予防の健康食材として利用され、漢方薬や健康補助食品の有効成分としても配合されていますが、その効能が必ずしも分子レベルで解明されているわけではありません。私たちは類例のない抗認知症作用をもつきのこ「ヤマブシタケ」に注目し、その特徴的な有機低分子成分の化学合成と生物活性検定によってきのこの効能を単分子レベルで理解・解明することを目指しています。今までに30種以上の低分子成分を合成し、そのいくつかに神経細胞保護効果があることを見出しました。
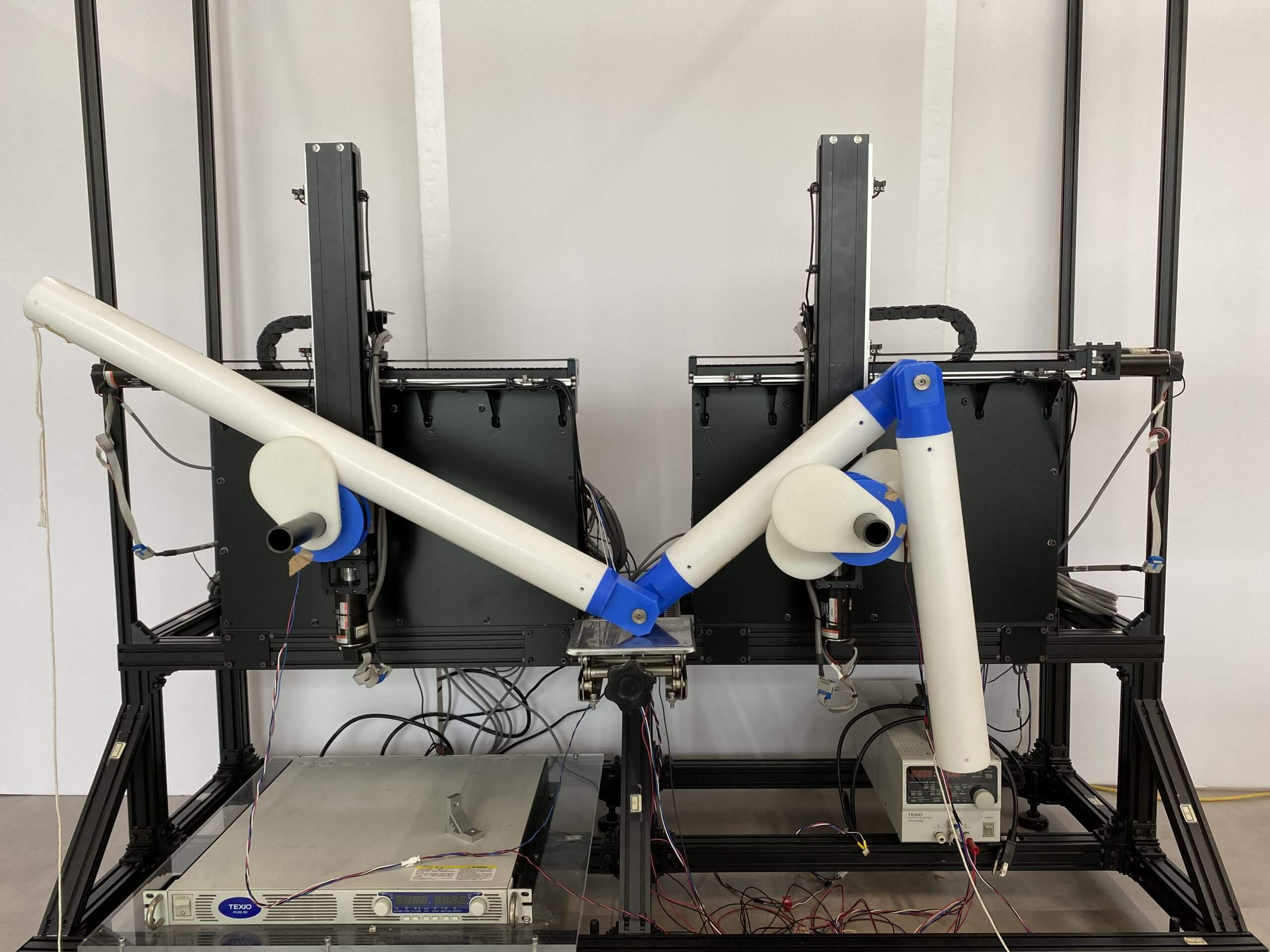
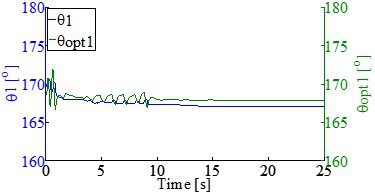
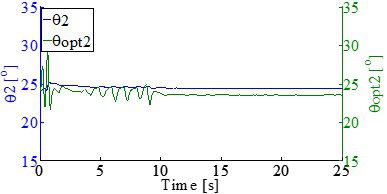
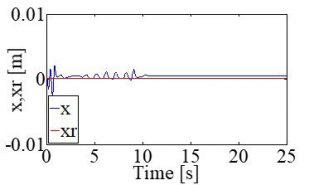
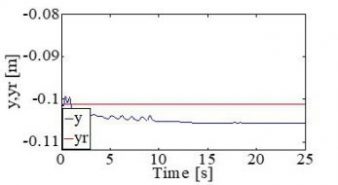
本研究では,力学的な本質を失わず,3次元運動を2次元運動に簡略化し,要介護者を二つの関節を持った3リンクの物体とみなす.そして,非把持双腕ロボットアームとリンクの間の静止摩擦を利用し,3リンク物体がロボットアームから滑り落ちないための安定領域を求め,その中に摩擦力が最も小さくなる姿勢を求める.得られた最適な角度を用いて,ロボットの抱きかかえ制御を行い,3リンク物体の安定支持が実現できることを示す.

論文
「Posture maintenance control of 2-link object by nonprehensile two-cooperative-arm robot without compensating friction」(2019)『IEEE/CAA Journal of Automatica Sinica』6(6)p.1397-1403.
「Development of a 2-link object with viscous joint for imitating care-receiver’s body」(2022)『Proc. of the 2022 International Conference on Advanced Mechatronic Systems』p.128-131.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2026 智と技術の見本市.