テキストアナリティクスによるカスケード災害の分析・評価
「カスケード災害」とは、ある事象が次々と他に影響を及ぼしていく連鎖現象を有する災害のことです。本研究ではカスケード災害を分析・評価するために、自然言語処理と機械学習を用いて新聞記事から災害事象の因果知識を抽出し、災害因果ネットワークを作成します。これをもとに被害を拡大・長期化させる脆弱性ポイントを見つけ出します。(東京大学廣井悠教授との共同研究)
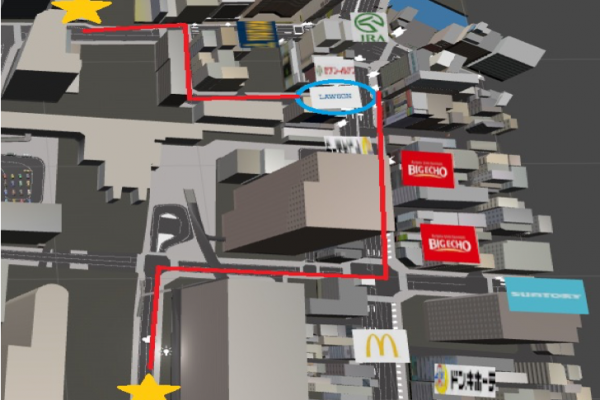
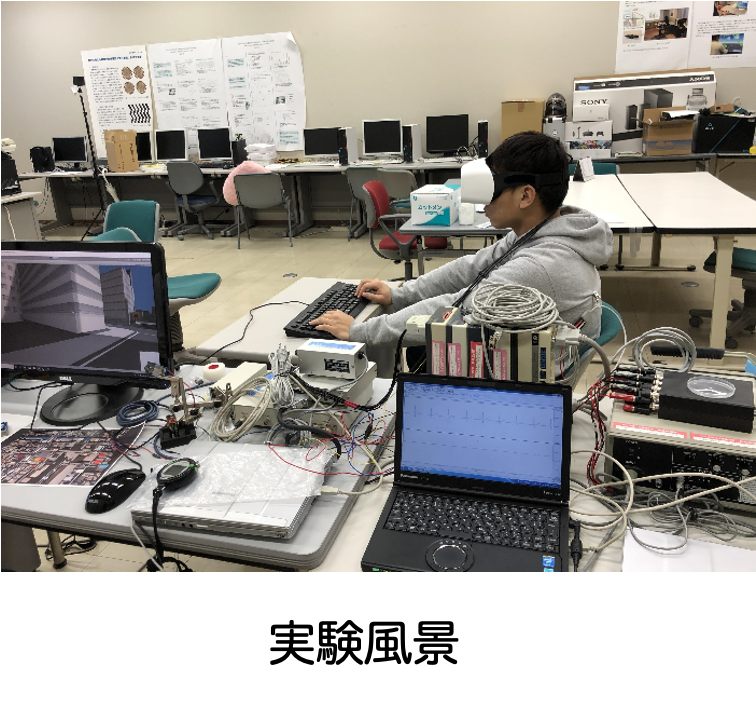
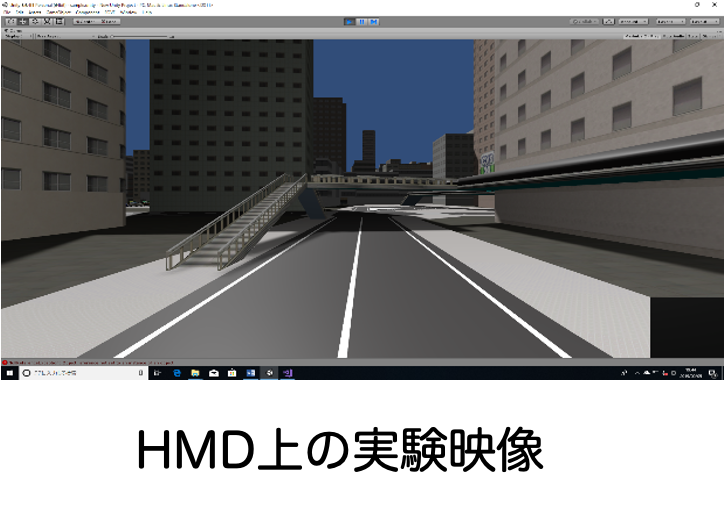
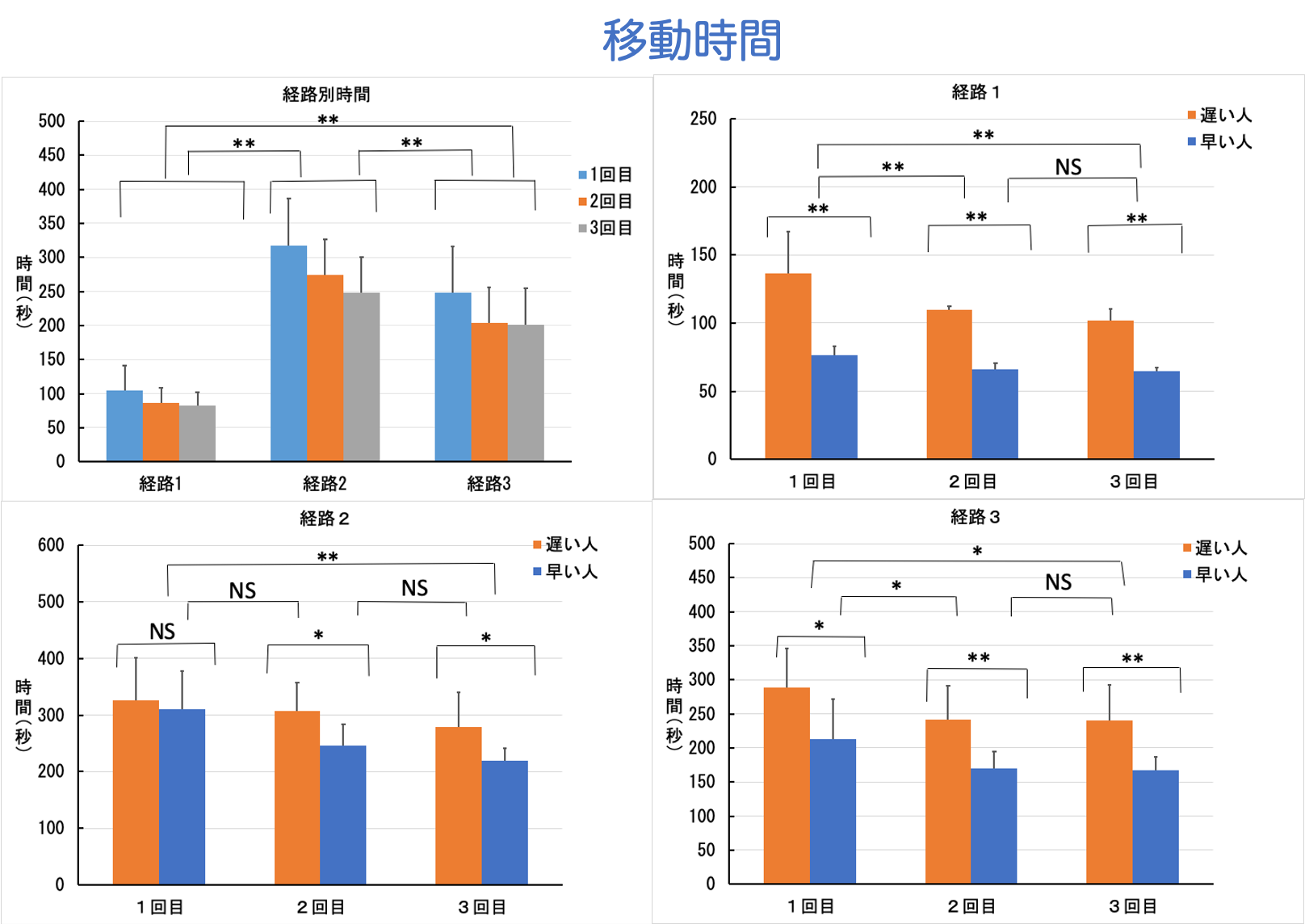
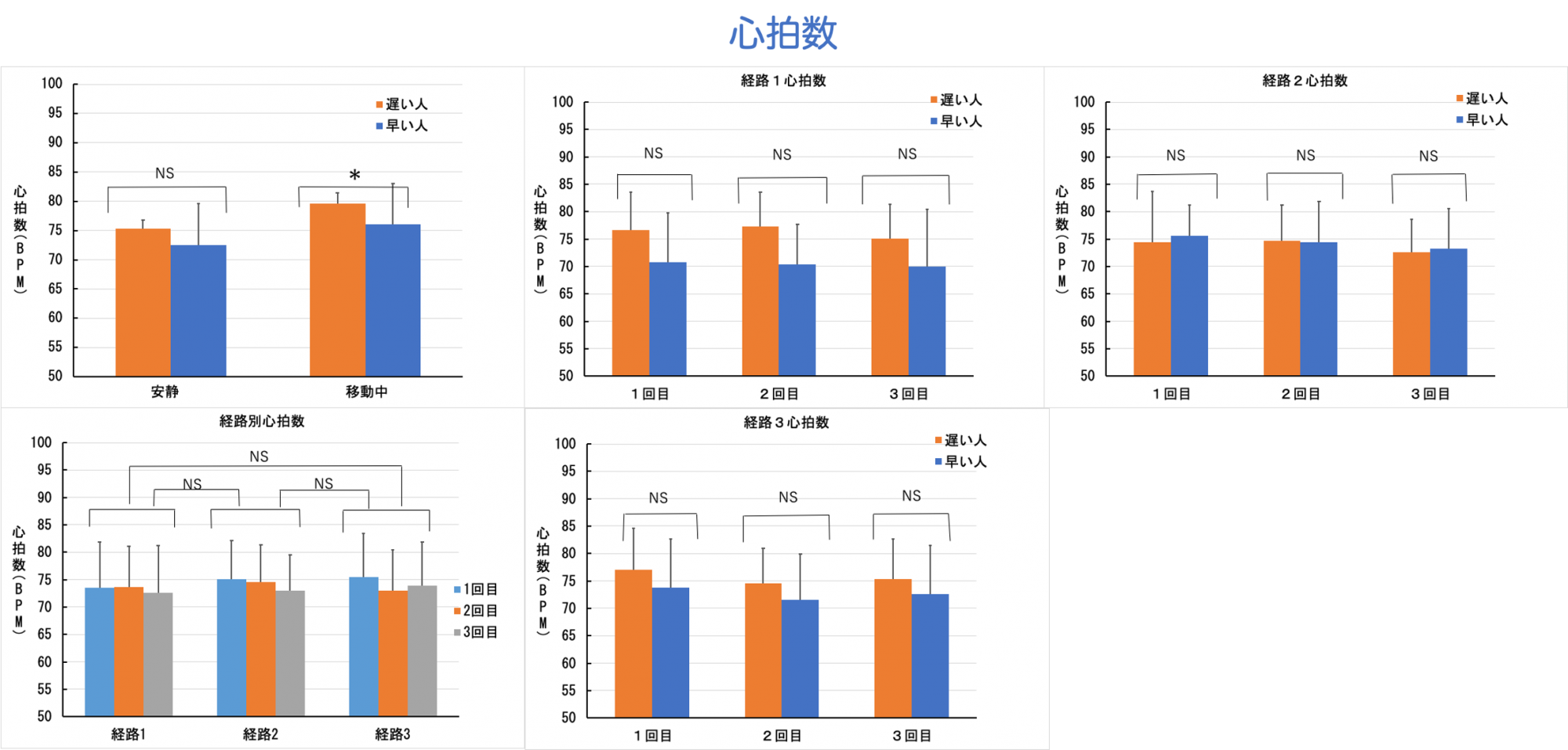
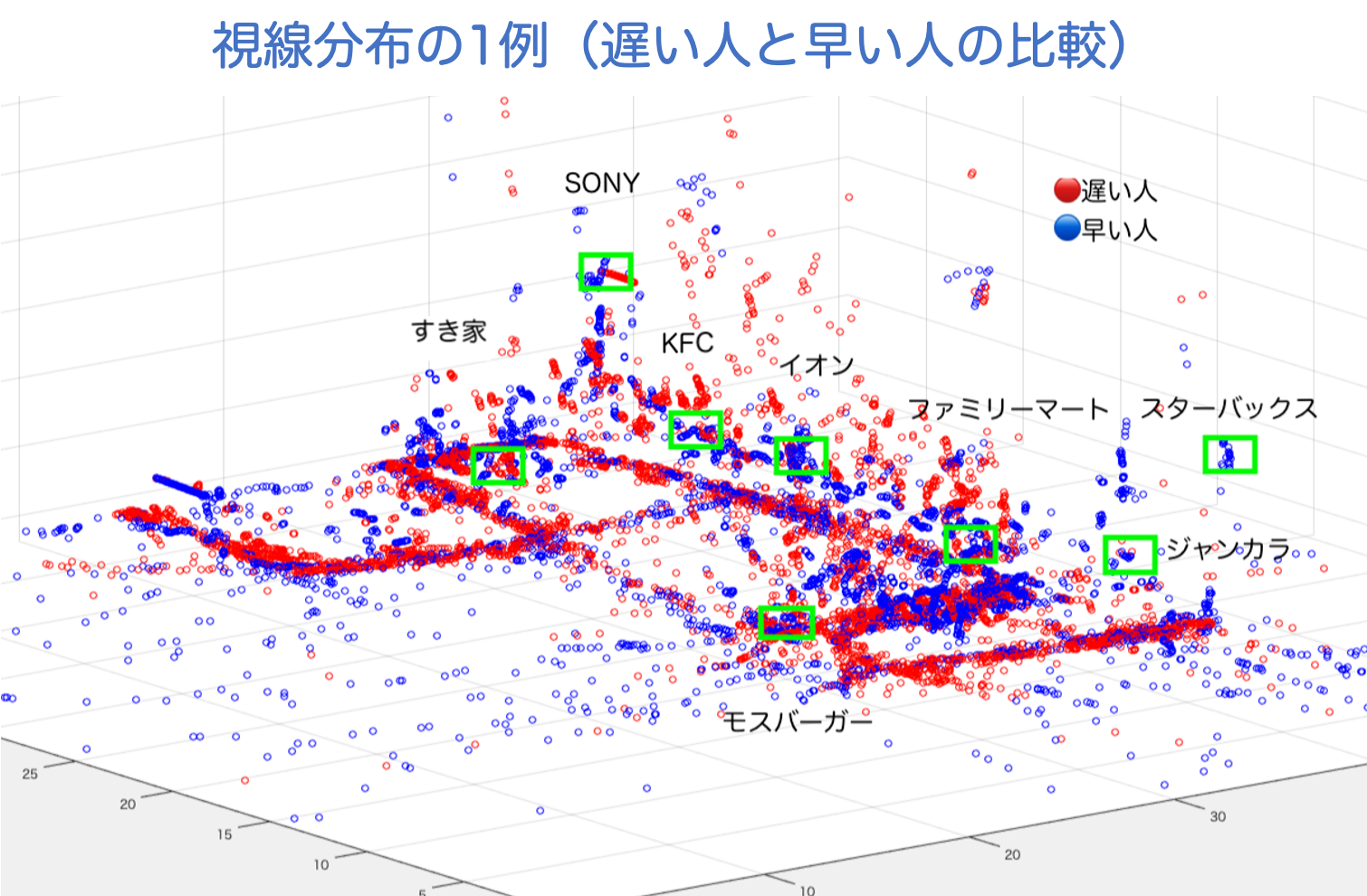
道に迷いやすい人と,1度で道順を覚えて目的地に移動できる人がいる.道に迷わない空間把握能力の高い人は,実空間においても,VR空間においても,同じように目的地まで迷わず行ける傾向がある.このような人は,どのように視覚情報を得て,道順を記憶し,移動しているのだろうか.これまでの研究で,この点について詳細は明らかではない.そこで本研究では,看板等のある都市部の街並みを模したVR空間内を移動し,目的地まで到達する間の視線を検討した.また,心理的指標の1つとして,移動中の心拍数の変化についても検討した.将来的には,実空間においても,記憶に残りやすい街並みや,空間を移動しながら行う探索型の教育コンテンツやゲームのVR空間において,迷わず進める空間作りの1つの基礎データとなることを期待し,本研究を行った.

論文
「The relationship between spatial cognition and gaze distribution in virtual reality space」(2019)『Journal of Physical Fitness and Sports Medicine』Vol.8, No.6p.389.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2025 智と技術の見本市.