将来エンジンの燃料設計コンセプト
カーボンニュートラル社会の実現に向けて火花点火エンジンには超高圧縮比・超希薄燃焼による究極の熱効率向上が求められる。燃料には酸素過多の条件で増長するノッキングを抑制するために低温域では着火性が低く、希薄条件で増長する燃焼変動を抑制するために高温域では着火性が高いという、温度域により相反する着火特性が求められる。エンジン実験ベンチを自作し、この要求を満たす燃料の探査を行っている。
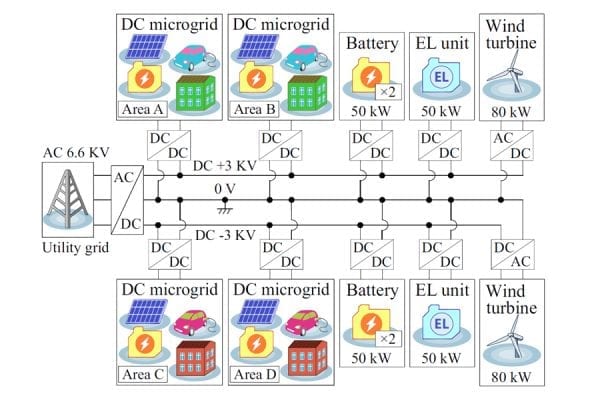
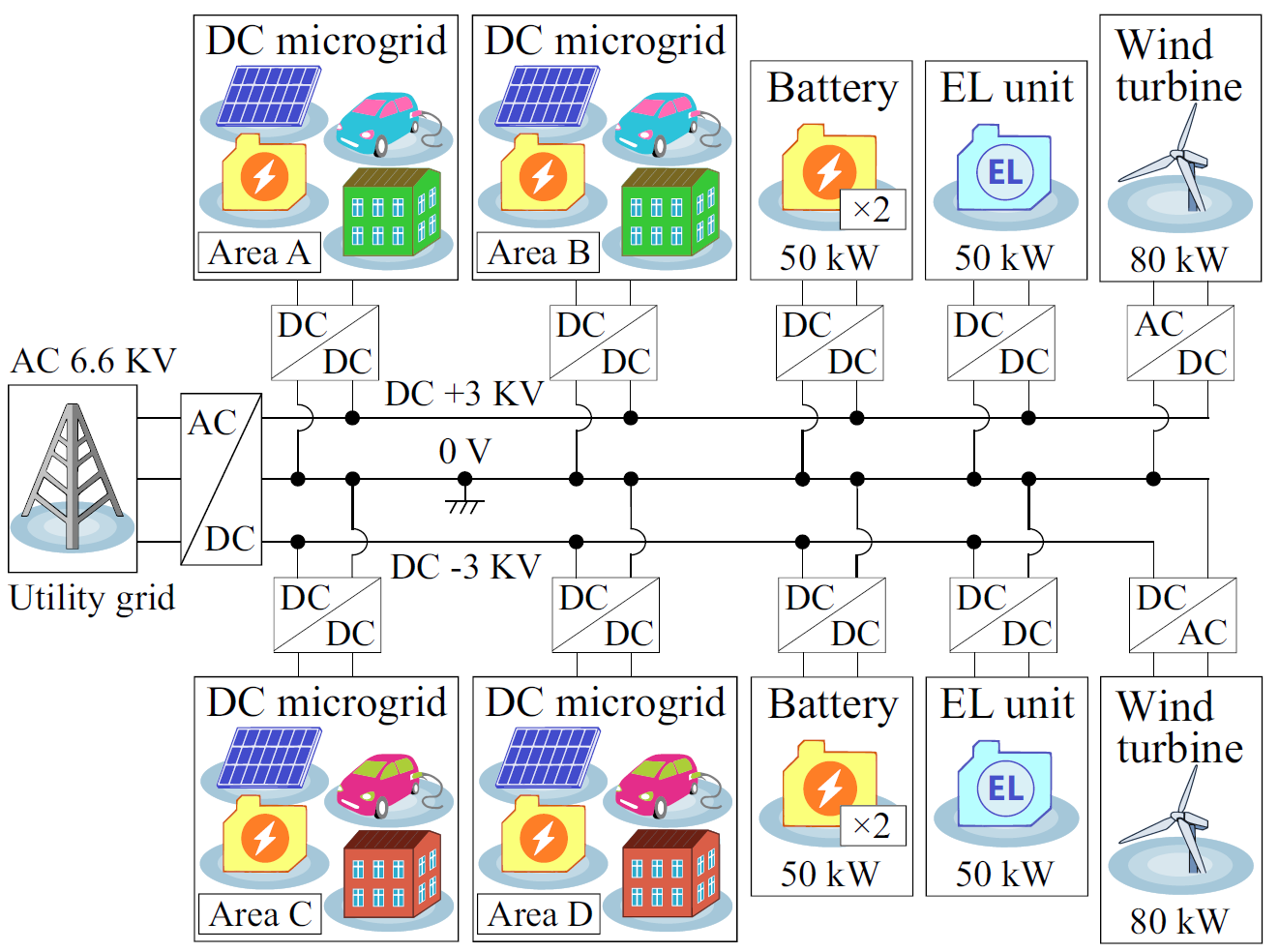
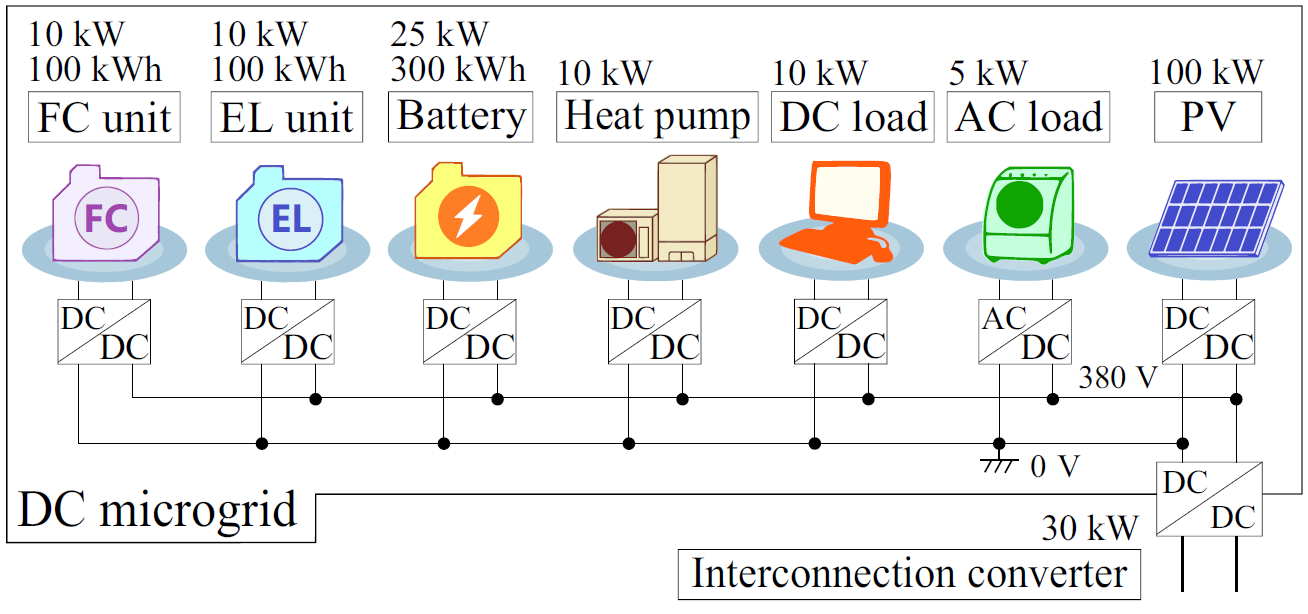
再生可能エネルギーの大量導入を可能にするDCスマートグリッドのための新しいマネジメント手法を開発した。提案するDCシステムは自立運転を可能とする設計であり、エネルギー貯蔵装置の活用だけでなく負荷制御や再生可能エネルギー電源の出力抑制制御を通信システムを利用せずに実現する。DCマイクログリッドのシンプルでロバストな自立運転のために、PVモジュールの特性を利用する新規のDroop制御手法を提案した。新規のDroop制御は最大電力の推定を行わないシンプルな制御システムにより、PV出力電力の適切な抑制を可能とする。
論文
「Islanding operation scheme for DC microgrid utilizing pseudo droop control of photovoltaic system」(2020)『Energy for Sustainable Development』55p.95-104.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2025 智と技術の見本市.