交通安全のためのヒューマンファクター研究
交通事故を低減するためには,情報工学的な技術の開発だけでなく,それらの技術を利用する・技術の恩恵を受ける人間そのものの理解が必須です.本研究室では,認知科学・心理学を基盤としたヒューマンファクター研究により,社会の安全性や快適性,生産性の向上に寄与することを目指します.

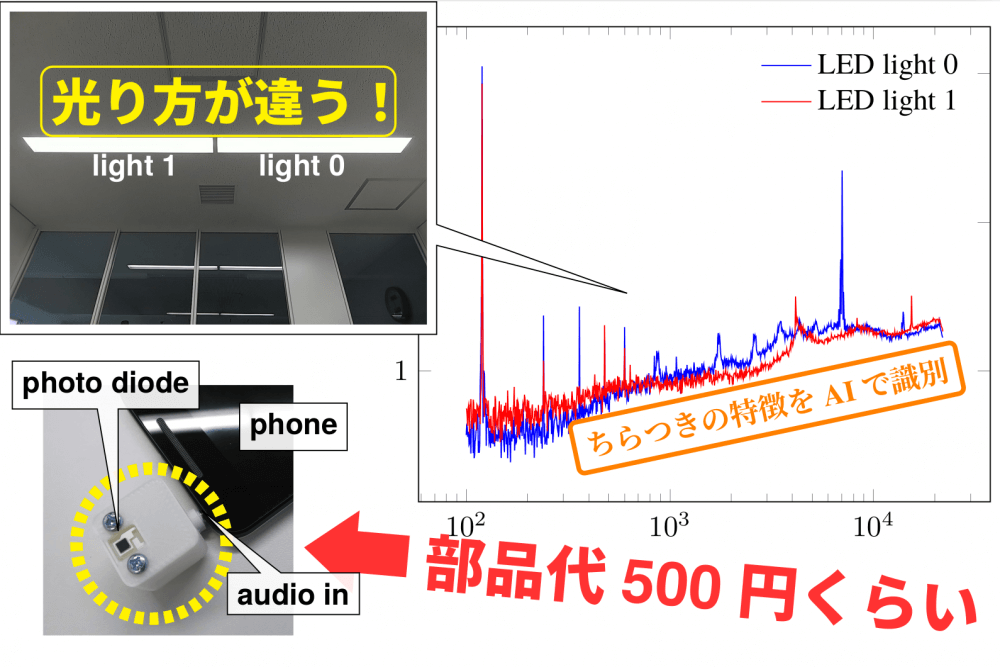
屋内に設置されている照明光は、多くの場合個体差があります。「部屋A」と「部屋B」の照明機器はたとえ同一モデルであっても微妙な個体差があるのです!もちろん人間が目で見てわかる違いではありません。本技術はそれをAIで識別し、屋内の位置推定に用います。httpss://youtu.be/Ih_vuh6v3hs

論文
「屋内定位のための既設照明光の特徴分類手法CEPHEID」(2021)『計測自動制御学会論文集』57(1)p.2-10.
「CEPHEID: the infrastructure-less indoor localization using lighting fixture's acoustic frequency fingerprints」(2019)『Proc. of the IEEE 45th Annual Conference of the Industrial Electronics Society (IECON 2019)』p.6842-6847.
「Indoor Positioning Scheme Using Off-the-Shelf Lighting Fixture's Fingerprints」(2023)『Journal of Robotics and Mechatronics』35(3)p.780-787.
特許
特願2019-123518特許第7269630号「位置推定装置、照明装置特定装置、学習器、及びプログラム」
特願2015-055969特許第6259233号「移動ロボット、移動ロボット制御システム、制御図形の表示されたシート、及びプログラム」
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2026 智と技術の見本市.