遺伝的アルゴリズムによる地上放送システムの無線資源割り当て最適化技術
本技術のコアは,遺伝的アルゴリズムを用いて放送局の送信電力と使用チャネルを割り当てる際,膨大な地図情報を取り入れると計算不能になるため,各局の放送エリアを簡単に近似できる数学モデルを構築し,これを最適化アルゴリズムに入れることで,計算を可能にする.
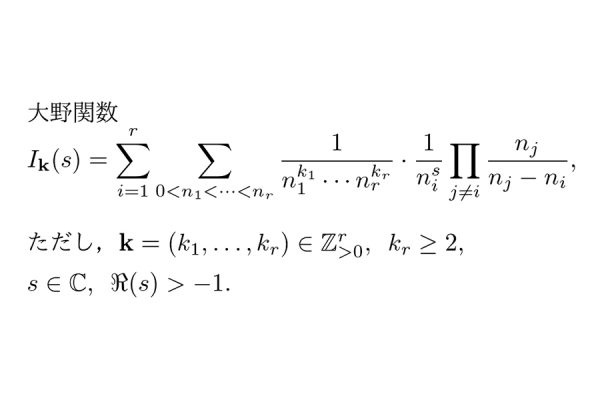
画像の関数を大野関数といい,互いに双対なインデックスに対する大野関数は,複素関数として等しいことが知られている.特に0以上の整数点での値を考えると多重ゼータ値の理論における大野関係式が導かれるため,それは大野関係式を補間したものであるといえる.本研究では,大野関数が積分表示を持つことを示し,それにより大野関係式の補間の別証明を与えた.
論文
「Analytic properties of Ohno function」(2021)『Mathematica Scandinavica』121p.600-616.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2025 智と技術の見本市.