空中への3次元映像表示技術
情報科学部
情報メディア学科
空間映像システム研究室
河北真宏
教授
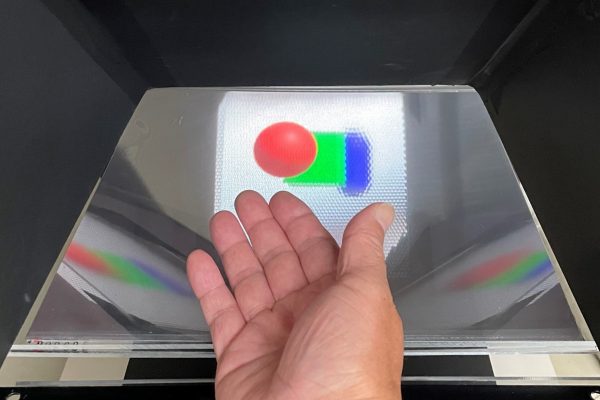
近年,非接触型タッチパネルなどのニーズの高まりとともに,空中に映像を表示する技術(空中映像技術)の研究が盛んになっている.現在,テンキーやメニュー画面などの2次元映像を空中に表示し,非接触でインタラクティブ操作する装置が開発されている.本研究では,ボリュームや視差がある3次元映像を空中に表示する技術を実現し,より多彩なインタラクション操作が可能な映像メディアの実現と幅広い分野への応用を目指している.
論文
「光線再生による空間像表示技術」(2021)河北真宏『光学』129(9)p.24-30.
「Design of optical viewing zone suitable for eye-tracking integral 3D display」(2021)OkaichiNaoto『OSA Continuum』4(5)p.1415-1415.
「Integral 3D/2D partially convertible display using geometric phase lens array」(2021)WatanabeHayato『Results in Optics』3p.100061-100061.
特許
特願2016-032086特許第6730817号特開2017-151202「立体像表示装置」
特願2016-120027特許第6751600号特開2017-225034「要素画像群生成装置、符号化装置、復号装置、およびプログラム」
特願2015-227303特許第6714347号特開2017-097084「立体像表示装置」