初等中等教育向けロボットプログラミング学習環境
2020年度から小学校においてプログラミング教育が必修化された。小学校では、ビジュアルブロックエディタを利用したプログラミングが想定されるが、中学校、高校では、テキストエディタを利用することになる。そこで、ビジュアルブロックエディタからテキストエディタへの移行をスムーズに行えるように、両エディタに対応したロボットプログラミング学習環境を開発した。また、教員の負担を軽減するための教員支援システムも開発した。
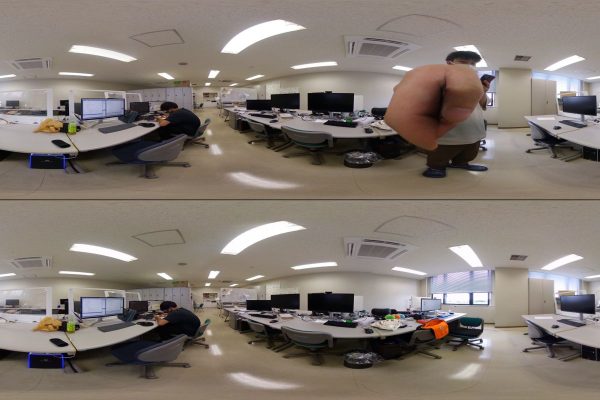
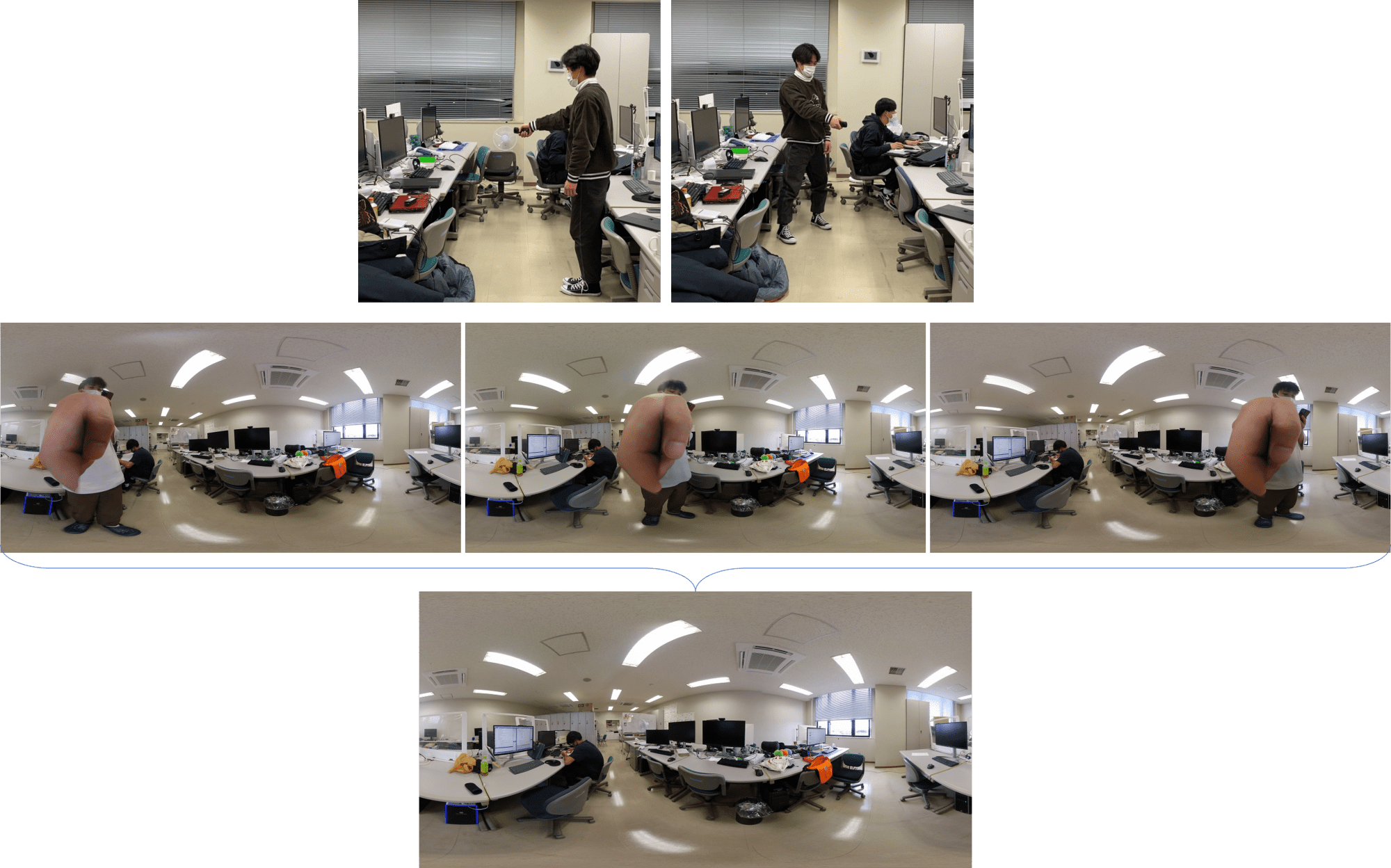
手に持って簡単に撮影できる全方位カメラ(360度カメラ)が普及し、気軽に360度全方位画像・映像を取得できるようになってきました。このような画像や映像は、Googleストリートビューや不動産サイトでの物件内覧といったVRシステムに利用され、ユーザが好きな方向を見回すことができます。しかし、全方位カメラによる撮影では、その撮影者や周辺の動物体も画像・映像中に映り込んでしまうことが多く、そのままの画像をVR用途で使うことはできません。そこで本シーズでは、複数の画像を合成することで撮影者や動物体を全方位画像から消去します。

論文
「撮影者が写らない全方位画像生成のための撮影と合成」(2023)『画像電子学会誌』
「Background estimation for a single omnidirectional image sequence captured with a moving camera」(2014)『IPSJ Transactions on Computer Vision and Applications』6p.68-72.
「Video completion for generating omnidirectional video without invisible areas」(2010)『IPSJ Transactions on Computer Vision and Applications』2p.200-213.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2025 智と技術の見本市.